
ZMPは、1月29日、物体検出時の距離精度を向上させたステレオカメラシステム「ZMP RoboVision2s 物体検出パッケージ」の販売を開始した。

同製品では、ステレオカメラでの視差画像から算出した距離情報に加え、前方に存在する信号機や標識など、ステレオカメラの前方の物体検出を行う検出エリアの幅、奥行き、高さを指定した検出が行える。
また、検出する物体の幅と高さを指定することでユーザーが検出したい対象物に絞った物体検出が可能。
すべての画像領域を対象とせず、物体の存在する画像領域を指定し、画像認識などの後処理を行うことで、より効率的な処理が行えるとしている。

– 物体検出結果(信号検出)-
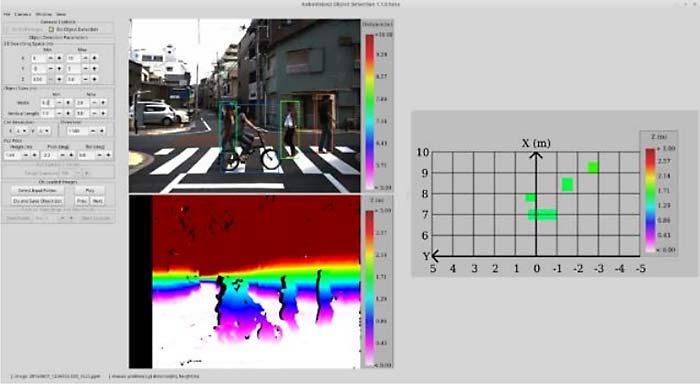
– 物体検出サンプルアプリ画面 –
また、検出した物体の大きさ(幅、高さ、奥行き)、物体のカメラからの位置座標に加え、検出した物体の点群情報も出力することができ、画像情報と点群情報を組み合わせた開発も可能だ。
同製品は、自動車のADAS・自動運転技術開発や移動ロボット開発など、ステレオカメラ画像による周辺環境認識を利用したシステムの研究開発への活用が可能。
価格は、RoboVision 2s本体・処理PC・物体検出ソフトウェアのセットで 180 万円(税別)、すでに RoboVision 2s 所有者には、物体検出ソフトウェアのみで 50 万円で1月29日から、出荷する。

[価格]
RoboVision 2s 物体検出パッケージ 180 万円(税別)
(RoboVision 2s、物体検出オプション、PC のセット)
[ステレオカメラユニット RoboVision 2s の主な仕様]
<カメラモジュール>
イメージセンサ:ソニー製1/3型有効127万画素 CMOSイメージセンサ IMX224×2
解像度:1280×960ピクセル(30fps)、640×480ピクセル(120fps)
水平画角:45°
インタフェース:USB3.0
基線長:210mm
機能:同期、ひずみ補正、ステレオ平行化、ワイドダイナミックレンジ、など
<ソフトウェア開発環境(SDK)>
ライブラリ:カメラI/F、視差画像生成
アプリケーション:RAW出力、ひずみ補正結果出力、視差画像出力*
動作環境:Linux/Windows8.1
※製品イメージ、仕様は開発中のものであり、予告なく変更される場合がある。
*解像度・フレームレートはPCのスペックに依存する。
RoboVision2s 製品紹介ページ:
http://www.zmp.co.jp/products/robovision2s