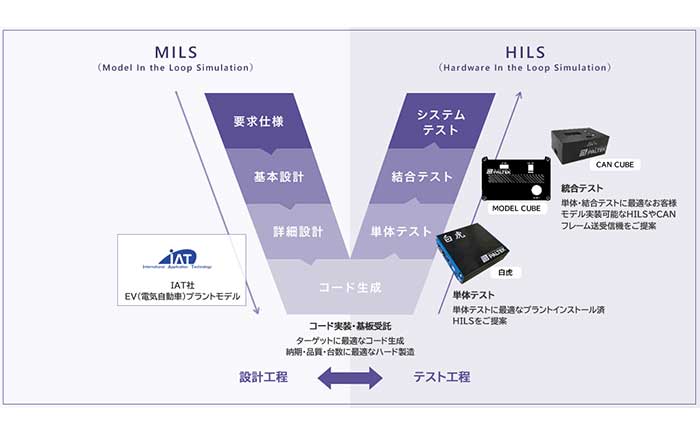
パルテック(PALTEK)は8月23日、自動車開発エンジニアリング事業の「IAT」と販売代理店契約を締結し、電気自動車(EV)の性能予測や制御内容の検証に便利なMathWorks社のSimulinkを用いた、MILS(Model In the Loop Simulation/※1)向けEVプラントモデルを、国内で8月から販売開始したと発表した。

自動車業界では、「CASE(※2)」の潮流により、世界の自動車産業構造が大きく変革し、EVや自動運転、コネクテッドカーなど、次世代の開発アイテムの数が増え続けている。さらに、自動運転車の開発競争も国際的に激化、人材の育成・獲得競争が喫緊の課題になっている。
そのような課題を抱えるなか、車載システムの開発現場では、既に導入されている検証環境だけでは、多数の開発プロジェクトを前に限られた技術者で対処しきれなくなっているのが実情だ。
そこで、例えばソフトウェア開発を例とした場合、〝仕様検討〟〝要求分析〟〝基本設計〟〝詳細設計〟へ一歩ずつ手順を踏んでいく格好のシミュレーション技術を取り入れた「モデルベース開発」が急速に普及している。
この場合、「モデル」を用いて従来開発の各工程を改善し、品質や開発速度を向上することが可能となる。加えてシミュレーションモデルと実物(ハードウェア)を使用したシミュレーション手段と採っていくHILS環境では、ハードアエアを模したプラントモデルを、専用のハードウェア装置で実行し動作検証が行える。
パルテックではこれまで、V字プロセスにおける検証装置として「白虎」や「MODEL CUBE」「CAN CUBE」などの製品を販売してきたが、今回、自動車開発にノウハウを持つIATと協業し、開発者が手軽にEVの性能予測や制御内容検証ができるEVプラントモデルの取り扱いを開始。V字プロセスのMILS側の設計プロセスの開発期間短縮や効率化に寄与していくとしている。
※1)MILS:PC上での設計段階モデルの検証。
※2)CASE:Connected(コネクティッド)、Autonomous/Automated(自動化)、Shared(シェアリング)、Electric(電動化)の頭文字をとった造語。
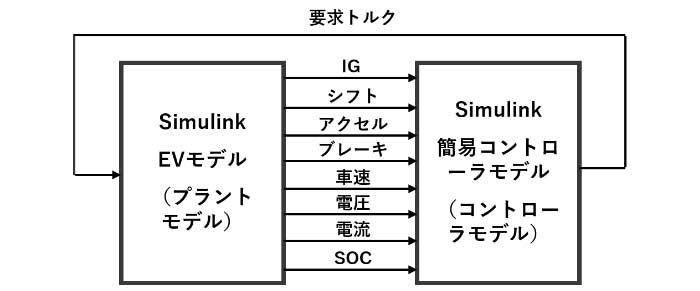
[プラントモデルの仕様:EV]
EVモデルは、以下4つのサブシステムから構成。
①モータモデル
– 入力:要求トルク/車速
– 出力:消費(発電)電力/実トルク
– 仕様:要求トルクとモータ回転速度からモータの消費(発電)電力を算出。
②バッテリモデル
– 入力:放電(充電)電力/初期SOC
– 出力:電池電圧/電池電流/SOC
– 仕様:放電(充電)電力から、電圧と電流とSOCを算出。
③ドライバモデル
– 入力:車速
– 出力:IGキー/シフト位置/アクセル開度/ブレーキストローク
– 仕様:上記4つを手動で操作する他、モード走行で目標車速となるようにAIドライバーが操作。
④ ビークルモデル
– 入力:モータトルク/ブレーキストローク/勾配
– 出力:車両速度
– 仕様:駆動(回生)力、走行抵抗、ブレーキ力、勾配から加速度を計算し、積算し、車両速度を算出。
<主な特徴>
・MathWorks社のSimulinkで使用できる電気自動車のプラントモデル。
・車両仕様は、Microsoft Excelで簡単に設定可能。
・簡易コントローラモデルも付属。
・カスタマイズ可能。
<対象>
・開発中のEVの電費性能、航続距離、動力性能の予測。
・EVのモータやバッテリの特性の電費、動力性能等への影響の比較検討。
・簡易コントローラモデルの制御パラメータをMATLABワークスペースに反映。
・車両仕様(重量、走行抵抗)の電費、動力性能等への影響の比較検討。
・開発中のコントローラの制御内容(回生制御等)の性能予測、検証。
・Vモデルをカスタマイズしての性能予測。