NTTデータ オートモビリジェンス研究所(以下「ARC(アーク)」)は、「自動運転システム検証・開発プラットフォーム」等の次世代モビリティ社会に必要な機能群のソフトウェア化を推進する研究開発プロジェクト「GARDEN」における成果として、オープンソースソフトウェア(以下「OSS」)である「GARDEN ScenarioPlatform」(ガーデン シナリオプラットフォーム)を2021年6月18日にリリースしたと、6月22日発表した。
「GARDEN ScenarioPlatform」のソースコードを無償公開することで、自動運転システム制御に関わるソフトウェア開発を進めている自動車メーカー・サプライヤ等の関係者に広く改修・活用してもらい、自動運転システムの開発促進に貢献することを目的としている。
背景・目的
自動車産業・交通社会におけるCASE時代を迎えた今日、自動車業界各社においては自動運転の実現に向けた研究開発が精力的に進められているが、その安全性の確保が大きな課題として存在しており、自動運転システムの根幹とも言えるソフトウェア開発においても、安全性検証の重要性が増している。
NTTデータグループの自動車ソリューション事業R&DセンターであるARCでは、今回、自動車メーカー・サプライヤ等での自動運転ソフトウェア開発における、シナリオベース開発プロセスを用いた有効かつ効率的な安全性検証を実現するために、研究開発プロジェクト「GARDEN」の成果の一部をOSS化した自動運転システム検証基盤ソフトウェア「GARDEN ScenarioPlatform」として無償公開することとした。
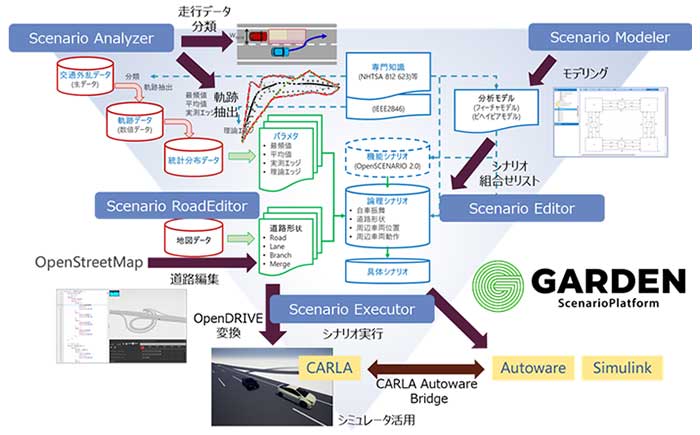
GARDEN ScenarioPlatformの機能概要
GARDEN ScenarioPlatformは、自動運転ソフトウェア開発におけるシナリオベース開発プロセスをサポートし、自動運転ソフトウェアの機能動作シミュレーションにて実行可能なシナリオを生成する。
GARDEN ScenarioPlatformはシナリオベース開発プロセスにおいて、FOT(フィールド実証実験)等から得られる走行データを分析してシナリオを抽出し、統計データからパラメータの範囲を特定することが出来るようになる。また、専門知識から得られた検証シナリオについては、抽象度の高いシナリオ記述からシミュレーション実行可能な具体的なシナリオへ段階的記述することが可能。
シミュレーションにおいては、「CARLA」を活用し「Autoware」や「Simulink」との接続実績がある。また、シナリオベース開発における国際標準フォーマット「OpenSCENARIO」「OpenDRIVE」に対応した既存シミュレータとの連携も想定している。
GARDENプロジェクトURL:https://open-garden.github.io/garden/