日本ユニシスは8月16日、「戦略的イノベーション創造プログラム(SIP)第2期/自動運転(システムとサービスの拡張)/仮想空間での自動走行評価環境整備手法の開発」(以下「SIP自動運転」)において、11月2日から東京臨海部実証実験フィールドである臨海副都心地域(お台場)の環境を仮想空間上で再現したシミュレーションモデルの使用体験を実施すると発表した。
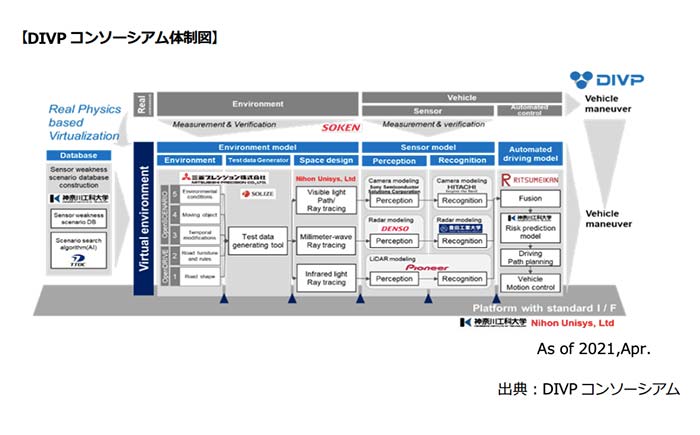
日本ユニシスは「SIP自動運転」に、エンジニアリング分野の知識・技術・経験を生かし、2018年から参画。センサーメーカー、ソフトウエア会社、大学など産学12機関からなる「DIVPコンソーシアム」を形成し、さまざまな交通環境下における再現性の高い安全性評価を行うため、実現象と一致性の高いシミュレーションモデルの開発に着手し、このモデルに基づいた仮想空間における安全性評価プラットフォーム「DIVP(Driving Intelligence Validation Platform)」の構築に取り組んでいる。
![]()
今回のシミュレーションモデル使用体験においては、実測に基づく NCAP環境、および臨海副都心地域の仮想環境でのシミュレーション群を、シナリオパッケージとして用意しており、参加者は、このパッケージの実行結果にて、実際の環境要因(運転環境、道路、地形、天候など)が組み合わされた、現実の世界で起こり得るセンサーにとっての弱点(限界)を検証できる。また、この再現性に優れた仮想空間において、さまざまな条件設定で、安全性検証の作業効率化などを確認することができる。
■シミュレーションモデル使用体験の実施期間
2021年11月2日~2022年1月末