国土交通省は8月6日、国土技術政策総合研究所が、自動運転の普及拡大に向け、自車位置特定に必要な区画線の要件案(管理目安など)や、車両センサでは収集が困難な道路前方の状況(トンネル出口など)の情報提供手法についての共同研究者を公募すると発表した。
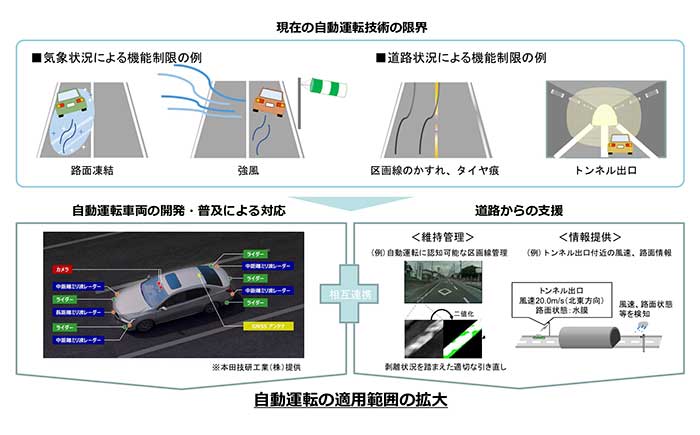
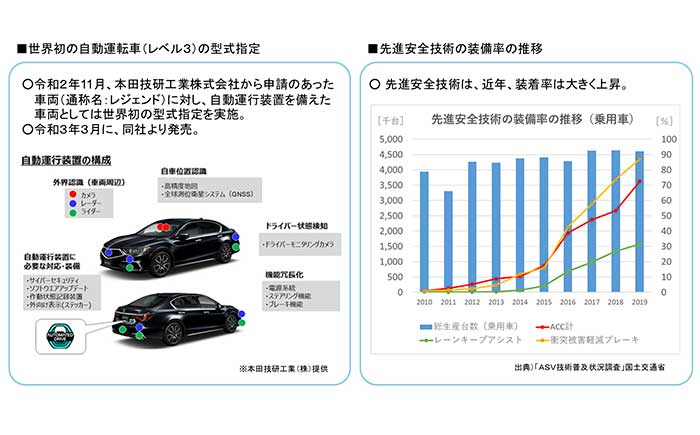
令和2年11月、世界初の自動運転レベル3の型式指定がされ、令和3年3月より市場投入が実現された。また、新車販売台数に占めるACC(Adaptive Cruise Control)搭載車両の割合は7割を超えるなど、先進安全技術の普及が進んでいる。一方、白線が適切に整備されていない区間や、前方の状況が不明確な区間(トンネル出口など)では自動運転を継続できないという課題が指摘されている。
そのためこの共同研究では、主に高速道路での安全で円滑な自動運転を実現する上での課題を道路との連携により解決することを目的に下記の研究を行う。
■共同研究の項目
A 自車位置特定補助情報に関する研究
自動運転車の自車位置(横断方向)特定を補助する観点から、区画線や路面標示の要件案の作成、実証実験による検証等を行う。
B 先読み情報に関する研究
車両単独では検知できない前方の状況(先読み情報)を車両に提供することで自動運転の継続を支援するという観点から、対象とするユースケースの特定、各ユースケースにおいて収集・提供する情報項目の特定、情報収集・提供フォーマット案及び情報収集・提供システム仕様案の作成、実証実験によるフォーマット案及びシステム仕様案の検証等を行う。