

衛星測位技術を活用するレベル4の自動運転を市場最安値で
東海クラリオン![]() (TCL)、アジア・テクノロジー・インダストリー
(TCL)、アジア・テクノロジー・インダストリー![]() (ATI)、国立研究開発法人宇宙航空研究開発機構
(ATI)、国立研究開発法人宇宙航空研究開発機構![]() (JAXA)は8月8日、新たな発想の宇宙関連事業の創出を目指す「JAXA宇宙イノベーションパートナーシップ(J-SPARC)」の枠組みのもと、2023年6月より「後のせ自動運転システムYADOCAR-i(ヤドカリ)ドライブ」に関する共創活動を開始した。
(JAXA)は8月8日、新たな発想の宇宙関連事業の創出を目指す「JAXA宇宙イノベーションパートナーシップ(J-SPARC)」の枠組みのもと、2023年6月より「後のせ自動運転システムYADOCAR-i(ヤドカリ)ドライブ」に関する共創活動を開始した。
この共創活動では、東海クラリオンとATIが地域限定で自動運転レベル4の実現を目指し開発を進める“YADOCAR-iドライブ”に、JAXAのセンチメータ級測位補強信号を活用した高精度単独測位「MADOCA-PPP」を適用させる事で、測位の精度向上と高速化を実証する。
YADOCAR-iドライブとMADOCA-PPPの組み合わせにより、過疎化の町に於ける日常の足として、また、観光地におけるラストワンマイル(移動を必要している人が目的地に到着するための最後の区間)の移動手段としてレベル4の自動運転を市場最安値で実装することを目指す。

共創活動に至った経緯は、全国に2000箇所以上ある限界ニュータウンに於いて、交通弱者の生活の足として自動運転車が期待されている事がある。また過疎地での高齢者の日常の移動でも、決まったルートかつ狭い道を低速で走行する安価な自動運転車が求められている。
他にも国内外のリゾート地などの観光スポットで、ラストワンマイルやワイナリーの中での移動など、自動運転の車両が求められる場面は少なくない。
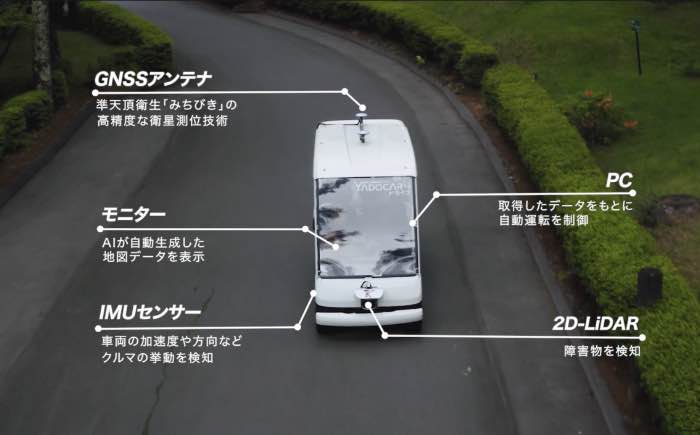
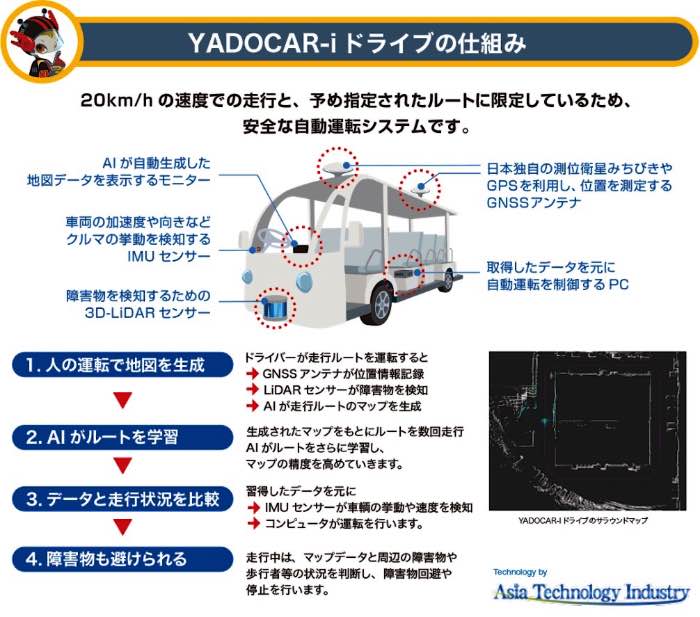
そこでこれらのニーズに応えるべくTCLとATIは、既存のモビリティ車両に最小限の機材の追加搭載で自動運転を実現するYADOCAR-iドライブを共同開発した。

システムは追加機材を最小化するため、また国内用と国外用のシステムを共通化するため、YADOCAR-iドライブでは、走行ルート作成に準天頂衛星“みちびき”を主軸にしたQZSSの位置情報を用いる。
具体的には、アジア太平洋地域への展開等を想定し、“みちびき”2~4号機および初号機後継機のL6Eチャンネルで送信される実証実験向けのセンチメータ級測位補強信号を活用した高精度単独測位(MADOCA-PPP)を利用している。
結果、JAXAが行なう高精度測位技術(MADOCA-PPP)の高度化と、とTCL/ATIが行う自動運転システムの現場環境での走行実証を組み合わせる事で、レベル4の自動運転での運用が見えてきている。
そこでTCLは、自治体及び観光関連業界に対し、低価格自動運転の活用モデルとして「後のせ自動運転システムYADOCAR-iドライブ」を提案、自動運転走行のデモンストレーションを実施し、システムの有用性、利便性を可視化する事を決めた。
加えてATIは、MADOCA-PPPに対応したマルチGNSS受信機の開発・製造を行うコアと連携協力し、現場ごとに違う環境に適応した自動運転システムの開発を実施する。また走行結果を受信機開発にフィードバックすることで、受信機の自動運転利用への最適化を行い、自動運転システム全体の高度化を目指す。

最後にJAXAは、衛星測位利用者が世界中で時間と場所を問わずセンチメータ級の高精度測位を行うことができるよう、MADOCA及びMADOCA-PPPの技術開発に継続的に取り組む。
そもそも衛星測位はユーザの利用形態・環境に性能が大きく依存される。従って今事案では、低速EVによるレベル4自動運転実現の精度と利便性を高めるため、MADOCAの“みちびき”L1/L5信号対応及び中国の衛星測位システムBeiDou3への対応も行う。
これにより対応する衛星数が30機以上増え、上空視界が限られたアーバンエリアや山間地等に於いては準天頂衛星システムのMADOCA-PPPサービスを地上配信情報によって補完することで測位精度の向上が可能だ。
またMADOCAが生成する補正情報を用いた演算処理により高精度単独測位を行うユーザ測位用ソフトウェアであるMALIBを高度化し、従来20分程度必要としていた初期収束時間を1分以内へと短縮する事も目指す。
結果、3者の協力により、最初の1~2年で、MADOCA及びMADOCA-PPP高度化とYADOCAR-iドライブの実証走行を並行して実施し、開発と利用のフィードバックループを回す。そこで運用実績を積み、以降の現場実装を加速させていく計画だ。