

▲AI スーツケース利用イメージ
アルプスアルパイン、オムロン、清水建設、日本アイ・ビー・エムが正会員として活動する一般社団法人次世代移動支援技術開発コンソーシアム( CAAMP ![]() )は5月29日、2025年日本国際博覧会( 大阪・関西万博 )の会場内で視覚障がい者向けナビゲーションロボット「AI スーツケース」の実証実験に取り組む。
)は5月29日、2025年日本国際博覧会( 大阪・関西万博 )の会場内で視覚障がい者向けナビゲーションロボット「AI スーツケース」の実証実験に取り組む。
より具体的には、日本科学未来館( 館長:浅川智恵子 )が中心となって開発を進めるAI スーツケースをコンソーシアムが長期間・複数台同時に運用する。
このAIスーツケースは、視覚障がい者を目的地まで自動で誘導することを目的に開発されているスーツケース型ロボット。これまでコンソーシアムと未来館が相互に技術協力を行うことで、大型ショッピングモールや新千歳空港、未来館などの屋内施設や、未来館から最寄り駅までの屋外空間などで、一般ユーザーによるナビゲーション技術の実証実験を行ってきた。
例えば今年4月からは未来館で毎日定常的に試験運用を行い、より多くの実証データを蓄積。人混みでの誘導や障害物の回避などのナビゲーション技術の更なる向上に取り組んでいる。
一方で、大阪・関西万博では「未来社会ショーケース事業」の「スマートモビリティ万博」領域に於いて会場内で次世代の様々なロボットを実装・実証する「ロボットエクスぺリエンス」の展開が計画されている。

▲万博特別モデルの AI スーツケース(イメージ)
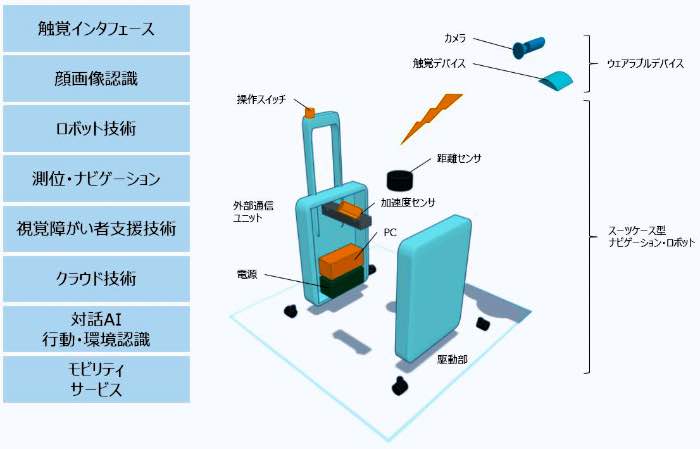
そこにAIスーツケースが参加予定者のひとつとして採用された。これを受けて段差の乗り越え機能を強化した新車輪機構や、低位置の障害物も認識するセンサーを新たに追加するなどの改良を重ねた屋内外共通利用型の万博特別モデルを未来館が中心となって開発。コンソーシアムが実証に用いる計画。
会場内で複数のAIスーツケースを長期間に亘って同時運用することで、社会実装に向けた運用モデルの技術的な課題を洗い出すなどの検証を行う。具体的な運用期間やエリアなどは、公益社団法人2025年日本国際博覧会協会と調整を進めていく。