NTTドコモは(以下、ドコモ)11月12日、北米のドローンメーカー「スカイディオ(Skydio/ちなみにドコモは自社傘下のNTTドコモ・ベンチャーズを通じてスカイディオへ出資済)」と、同社の自律飛行型ドローン「スカイディオ2(Skydio 2/自立飛行とは、ドローン操縦者の限定的な介入または介入なく障害物等を回避するなど安全に目的に応じた飛行を行うこと)」を11月13日から日本国内にむけて提供すると発表した。
また併せて、同じく自律飛行型ドローンの「スカイディオX2(Skydio X2)」や「スカイディオ・ドック(Skydio Dock)」についても<今後、順次提供していく予定だと云う。

先に記したスカイディオ2は、AIによる自律飛行技術や障害物回避技術だけでなく、赤外線カメラを搭載していることで従来では飛行が難しかった場所に於いても安全な飛行が可能だ。また操作の習得も容易なため、産業用途など、幅広い場面などでドローンのさらなる活用用途が期待できる。
一方、次いで紹介された「スカイディオ・ドック」は、これらのドローンを活用した点検・警備作業などに関するオペレーションを自動化・省人化するための技術を搭載しているため、さらなるドローン運営の効率化に寄与できる。
ドコモとしては、これらスカイディオ製品とドコモのドローンプラットフォームとして用意した「ドコモ・スカイ(docomo sky)」を連携させ、飛行計画の作成や撮影、取得データの管理・解析などを含めた一連の業務フローを一元管理。結果、ドローン活用のさらなる高度化・効率化が実現されるとしている。

左から、スカイディオ2とスカイディオX2、スカイディオ・ドック。
ちなみにドコモでは、スカイディオとの協業について今年1月以降から検討を開始。基地局鉄塔、道路下の構造物、家屋の屋根の点検作業等で、スカイディオ2の障害物回避技術が貢献する飛行上の安全確保への寄与。GPSとの繋がりが遮断され勝ちな倉庫や建物内等でも、GPS情報に頼らず飛行経路を導出する他、巡回航行に於ける有用性も確認した。
両社はこれら検証実績をもとに、今後、構造物やインフラ設備などの点検作業のみならず、屋内の設備巡回など幅広い利用シーンでドローン活用に取り組む。また今後は、様々な産業分野の社内・社外パートナーとの実証実験や検証を通して、より先進的なドローンサービスを提供していきたい意向だ。
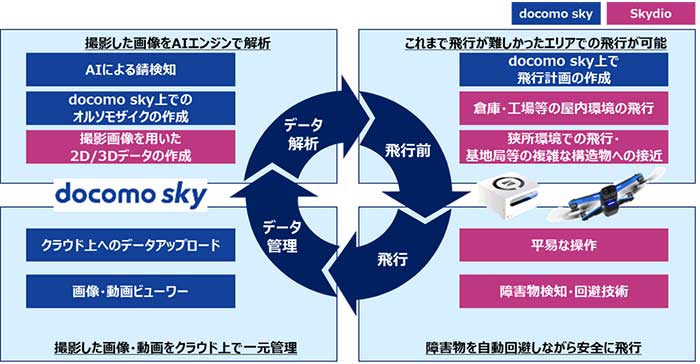
連携イメージ。

期待される活用領域の一例。
[スカイディオのドローンについて]
一方、スカイディオでは、AIによる自律飛行技術や障害物回避技術を搭載し、安全に飛行できるドローンを開発。法人客向けの機能として、垂直方向への180°画角調整ができる「180 Vertical View」や、障害物センサーの検知範囲を縮小した「Precision Mode」などを含む「Skydio Autonomy Enterprise Foundation」 を提供する。

左から、180バーチカルビュー(180 Vertical View)、360スーパーズーム(360 Super zoom)、スカイディオ3Dスキャン(Skydio 3D Scan)。
<特徴>
■安全性
6つの魚眼レンズカメラで常時周囲を確認することで、障害物を自動で回避する自律飛行が可能。GPSなどの位置情報が取得できない環境下においても安全な飛行が可能となるため、これまでのドローンでは撮影が困難だった道路下の構造物や屋内での活用が期待できる。
■操作性
特別な装置の準備や、長時間のセットアップ作業は不要。加えて、自律飛行技術や、障害物回避技術を搭載しているため、従来のドローンよりも操作方法を容易に習熟できる。
[スカイディオ2の有用性の検証]
ドコモは、スカイディオ2の障害物回避技術の有用性を検証するため、基地局鉄塔、道路下の構造物、家屋の屋根の点検作業を実施。また、GPSなどの位置情報が取得できない環境下での自律飛行について検証を行うため、倉庫内の点検や建物内の巡視作業を行った。なお検証にはスカイディオ2とドコモ・スカイに加え、現在開発中の飛行経路導出アプリやスカイディオ3Dスキャン(Skydio 3D Scan)も用いられた。
<検証の様子>
(1)高所構造物での飛行検証(基地局鉄塔点検)
障害物検知機能を活用することで、従来のドローンよりも点検対象物に近づいて撮影することができた。なお撮影した写真や動画は、ドコモ・スカイによる管理が可能。両者の連携により、現場の撮影者だけでなく、遠隔地にいる点検管理者へデータを効率的に共有することができる。
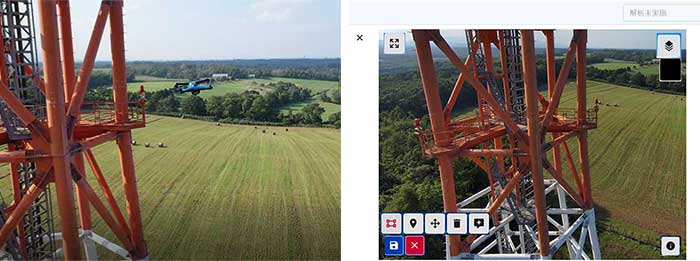
スカイディオ2による鉄塔点検の様子(左)と、ドコモ・スカイの撮影画像(右)。
(2)非GPS環境下での飛行検証(道路下の構造物点検)
安定的にGPS信号を受信することができない道路下は、従来ドローンで点検作業を行うことが困難とされてきたが、スカイディオ2の衝突物回避技術や飛行経路導出技術の活用により、これまで死角となっていた場所の写真撮影など、様々な場所での点検作業ができた。
また、飛行経路を3次元で自由に設定できる開発中の飛行経路導出機能では、操作画面での経路確認も可能。非GPS環境下における飛行安全性の向上が期待できる。
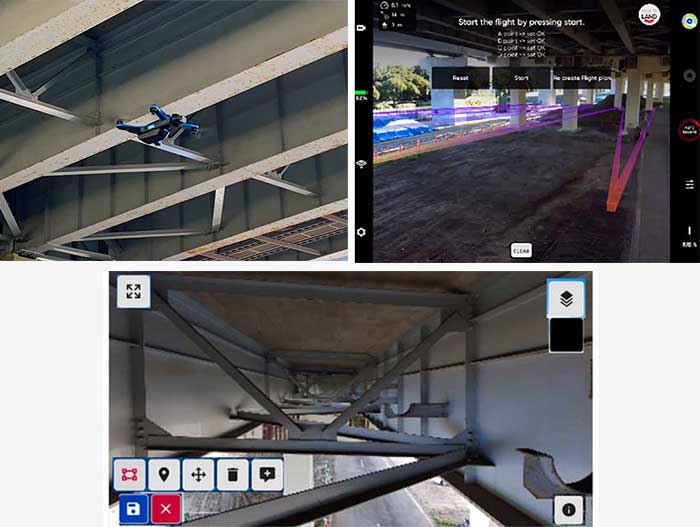
スカイディオ2による道路下の構造物点検の様子(左上)と、非GPS環境下での飛行経路導出の様子(右上)、ドコモ・スカイの撮影画像(下)。
(3)狭所での飛行検証(倉庫内点検)
倉庫内での棚上部の荷姿・梱包確認の作業等は、人手も必要で、効率化が求められる分野だが、場所が狭く、従来のドローンでは飛行が困難だった。しかし、スカイディオ2の障害物回避機能と、開発中の飛行経路導出アプリを活用することで、障害物を検知しながら安全に確認作業を行うことができた。
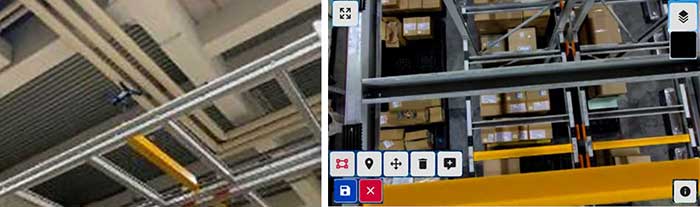
スカイディオ2による狭所自律飛行の様子(左)と、ドコモ・スカイの撮影画像(右)。
(4)屋内での自律飛行・撮影(建物内巡視)
スカイディオ2の障害物回避機能と、開発中の飛行経路導出機能の活用により、複雑な構造の学校校舎のような非GPS環境の建物内でも、自律飛行が可能。また、自律飛行時にカメラ画角変更が可能なため、巡視したい場所や位置を自由に設定できる。

スカイディオ2による屋内自律飛行の様子(左上)と、飛行中に確認可能な飛行経路の様子(右上)。そして、自律飛行の巡回イメージ(下)。
※画像には「DRONE FIELD KAWACHI」で撮影された画像が含まれる。
(5)スカイディオ3Dスキャンの検証(家屋の屋根点検)
スカイディオが開発を進める「スカイディオ3Dスキャン」は、構造物の領域を指定するだけで障害物を回避しながら安全に飛行することができるソフトウェア。例えば、屋根点検などで活用し、ドローンが撮影した画像をドコモ・スカイで確認することで、損傷箇所特定が容易になるなど、点検作業の効率化が期待できる。
またドローンが撮影した画像をもとに、2次元の合成画像を作成することで、地上からは状態が把握しにくい屋根全体の状況を1つのファイルとして確認することもできる。
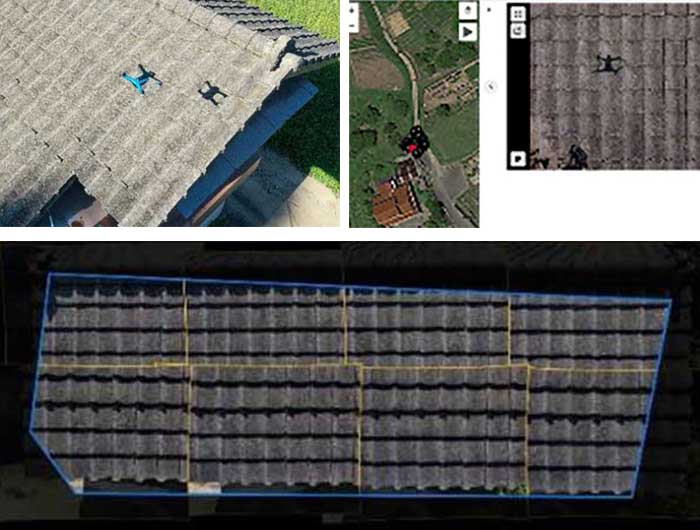
スカイディオ2による屋根点検の様子(左上)と、ドコモ・スカイの撮影画像(右上)。そして、スカイディオ3Dスキャンが作成した二次元合成画像(下)。
(6)追尾機能の検証(走行中の人物の自律飛行での追尾)
スカイディオ2は、対象物を認識し、対象物の動きを予測・追尾する機能があるが、安全に対象物を追尾するため、対象の認識だけでなく、障害物回避機能を活用している。

ドコモ・レッドハリケーンズに所属するラグビー選手・マピンピ選手を追尾している様子(左上)と、スカイディオ2で撮影したマピンピ選手(右上)。そして、ゴールポールを自律的に避けて追尾・撮影する様子(下)。
■Skydio:https://www.skydio.com/