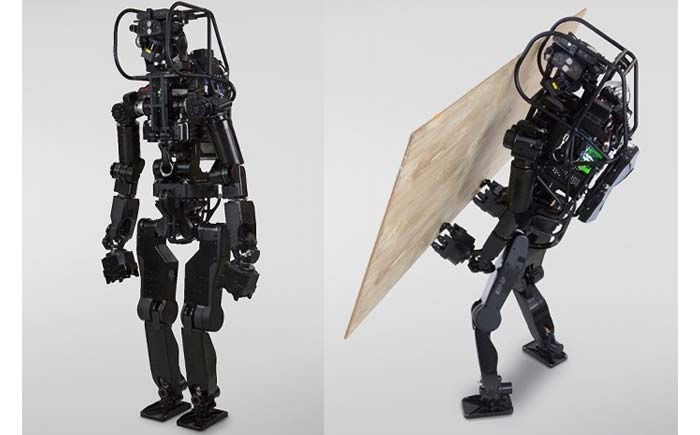
産業技術総合研究所(産総研)知能システム研究部門ヒューマノイド研究グループの金広文男研究グループ長、金子健二上級主任研究員、阪口健主任研究員らは、人間の重労働作業や、危険な環境での作業を自律的に代替する人間型ロボットの試作機HRP-5Pを開発した。

HRP-5Pは、HRPシリーズ(※1)の技術を継承しつつ最新のハードウエア技術を活用した、身長182cm、体重101kgの人間型ロボットで、HRPシリーズ最高の身体能力を備えていると云う。
さらに、環境計測・物体認識技術、全身動作計画・制御技術、タスク記述・実行管理技術、高信頼システム化技術からなるロボット知能を搭載し、建築現場での代表的な重労働作業である石膏ボード施工の自律的な遂行を実現。
産総研は、HRP-5Pを産学連携の開発プラットフォームとして活用することで、建築現場や航空機・船舶など、大型構造物組立での人間型ロボットの実用化に向けた研究開発が、加速することが期待できるとしている。

なお、今回開発した技術の一部は、10月1日〜5日にスペイン・マドリードで開催されるIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2018)で発表。
また、10月17日〜21日に東京ビッグサイト(東京都江東区)で開催されるWorld Robot Expo 2018で、静態展示される。

[研究の経緯]
産総研は、川田工業(現 カワダロボティクス)を始めとした複数の民間企業と協力してHRPシリーズを開発。実用化に向けた基盤技術の開発に取り組んできた。
HRP-2では二足歩行、寝転び・起き上がり動作、隘路歩行などを実現し、HRP-3では滑りやすい路面での歩行や遠隔操作による橋梁のボルトを締める作業を可能とした。
産総研が2011年から取り組んできた災害対応人間型ロボットの研究では、HRP-2の身体能力(手足の長さや可動範囲、関節出力など)を向上させたHRP-2改により、環境の3次元計測に基づく不整地歩行やバルブ回しなどの作業の半自律実行を実現してきた。
しかし、石膏ボード壁面施工のような重労働作業には身体能力が不足し、また、複雑な環境での人間の運動を模擬するには関節数や関節の可動範囲が十分ではなかった。
そのため、産総研は、人間の重労働作業を代替できる身体能力を備えた人間型ロボットHRP-5Pを開発することとした。
なお、HRP-5Pは、HRPシリーズの開発技術を継承するとともに、本田技研工業の特許を利用。
また、開発の一部は、新エネルギー・産業技術総合開発機構(NEDO)から委託された「次世代ロボット中核技術開発/(革新的ロボット要素技術分野)自律型ヒューマノイドロボット/非整備環境対応型高信頼ヒューマノイドロボットシステムの開発」、日本学術振興会の科学研究費補助金「環境モデル獲得に基づくヒューマノイドロボットの未知環境適応全身移動計画法の実現」(課題番号:JP17H07391)の支援により行われた。

[研究の内容]
産総研は、重労働作業の代替を目指し、強靭な身体と高度な知能を兼ね備え、ロボット単体で自律的な作業ができる人間型ロボットの試作機HRP-5Pを開発した。
●身長182cm、体重101kgで、首部2自由度(※2)、腰部3自由度、腕部各8自由度、脚部各6自由度、ハンド部各2自由度の合計37自由度を備え、ハンド部を除く自由度数ではHRPシリーズで最大。HRP-2改に比べ、腰に1自由度、腕部付け根に1自由度が追加されたため、より人間に近い動作が可能となっている。
これにより石膏ボード(1820 × 910 × 10mm、約11kg)や、コンパネ(合板)(1800 × 900 × 12mm、約13kg)のような大きな対象物の両腕でのハンドリングが可能となった。
●人間よりも自由度数が少ないロボットで人間の動作を模擬するため、複数の関節が集中する股関節部や腰関節部でも、最大限の可動範囲を確保。
例えば、脚を屈曲・伸展させる股関節の可動範囲は、人間の140度に対し、HRP-5Pでは202度(図1)、上体を旋回させる腰関節の可動範囲は、人間の80度に対し、HRP-5Pでは300度。これにより深く屈み込んで上体をひねった姿勢など、さまざまな姿勢での作業が可能となった。
●高出力モーターの採用、駆動機構への冷却導入、および一部の関節での複数モーターによる関節駆動方式の採用により、HRP-2改に比べて関節トルク、速度ともに平均で約2倍に向上。これにより石膏ボードを平積み状態から持ち上げるような、重負荷作業が可能となった(腕を水平に伸ばした状態での片腕の可搬重量がHRP-2改の1.3kg、HRP-4の0.9kgに対し、HRP-5Pでは2.9kg)。
●頭部複合センサーを用いて、常時(0.3Hz)周辺環境を3次元計測。計測結果の蓄積や記憶の更新により作業対象物で視野が制限される状況でも搬送の歩行計画や足部の滑りなどに対する歩行の補正が可能となった(図2)。
●新たに構築した作業対象物の画像データベースを用いて畳み込みニューラルネットワーク(※3)の学習を行い、2次元画像の10種の対象物領域を、背景や照明の条件が悪い状況でも90%以上の高精度で検出可能となった(図3)。
●ロボットシミュレーターChoreonoid(※4)上にロボット知能の仮想テスト環境を構築し、24時間ソフトウエアのリグレッション(※5)を監視。約25万行の大規模ソフトウエアの品質を維持し、信頼性の高いロボットシステムを構築することが可能となった。
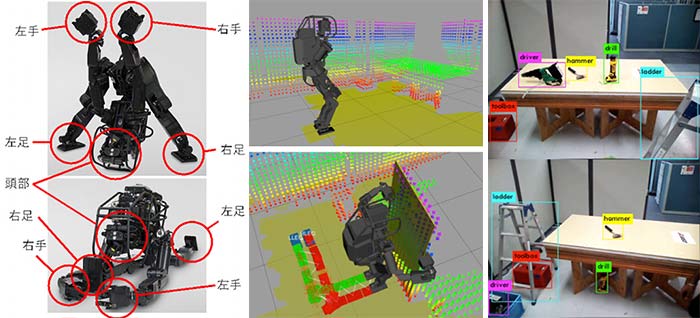
図1)左:前屈(上)、前後開脚(下)、図2)中:周辺地図(上)と歩行計画(下)、図3)右:対象物検出例
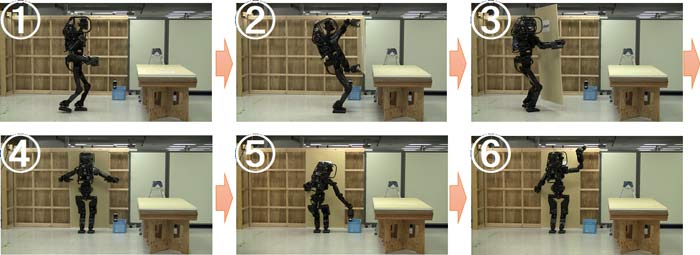
以上の技術の統合により、大型重量物のハンドリング、搬送が必要な石膏ボード壁面施工を、模擬住宅建築現場でHRP-5P単体で自律的に遂行することを実現した。
自律的な石膏ボード壁面施工は、具体的には、以下の一連の動作によって実現される。
① 周辺環境の3次元地図生成と物体検出を行い、作業台に近づく。
② 作業台に寄りかかりながら平積みされた石膏ボードを1枚ずらし、持ち上げる。
③ 周辺環境を認識しながら石膏ボードを壁まで搬送する。
④ 石膏ボードを降ろし、壁に立てかける。
⑤ 高精度ARマーカー(※6)を用いて工具を認識し、拾い上げる。
⑥ 胴縁(※7)を握って安定性を確保しながら壁に石膏ボードをビスで固定する。
[今後の予定]
HRP-5Pを、人間型ロボットの実用化を目指した研究開発プラットフォームとして、産学連携による活用を促進。プラットフォーム上でロボット知能の研究開発を進め、ビル・住宅、航空機や船舶などの大型構造物組立現場でのさまざまな作業の自律的代替を目指す。
これにより作業員不足を補うとともに、人間を重労働作業から解放し、より付加価値の高い作業に注力することを支援する。
※1)HRPシリーズ:
<HRP-1>
1998年から5年間にわたって実施された経済産業省「人間協調・共存型ロボットシステムの研究開発」(HRPプロジェクト)で、本田技研工業株式会社によって同社のP3をベースに開発された人間型ロボット。身長160cm、体重99kg(バッテリーを除く)。後のHRPシリーズで使用される二足歩行技術の基盤を構築。
<HRP-2>
HRPプロジェクトで、産総研が複数の民間企業と共同で開発した人間型ロボット。軽量高剛性、高密度電装系設計技術により、身長154cm、体重58kg(バッテリーを含む)を実現。2002年発表。二足歩行に加えて、転倒した状態から起き上がる動作を実現した。HRPプロジェクト終了後、研究開発用プラットフォームとして商品化され、国内外の大学、研究機関で利用されている。
<HRP-3>
NEDO基盤技術研究促進事業「実環境で働く人間型ロボット基盤技術の研究開発」にて川田工業、産総研、川崎重工業が共同で開発した人間型ロボット。2007年発表。実環境への応用を目指し、防塵防滴機能を搭載。滑りやすい路面での歩行や遠隔操作によるボルト締結などを実現。
<HRP-4C>
産総研の「ユーザ指向ロボットオープンアーキテクチャの開発」で開発した人間型ロボット。2009年発表。エンターテインメント応用を目指し、日本人青年女性の平均寸法に近いプロポーションとリアルな頭部と手部を持つ。人間らしい歩行動作や合成歌声による歌唱、ダンスを実現。後に介護機器の評価にも利用された。
<HRP-4>
産総研と川田工業との共同研究により、HRP-4Cをベースとして開発した人間型ロボット。2010年発表。仕様の最適化や部品の共通化・簡素化により、低価格の研究開発用プラットフォームを実現。
<HRP-2改>
NEDO「ロボット分野の国際研究開発・実証事業/災害対応ヒューマノイドロボットHRP-2改の研究開発」で、産総研がHRP-2を改造して開発した人間型ロボット。災害対応用に、脚部・腕部の延長やセンサー類の追加など身体能力を強化し、3次元環境計測に基づいて、不整地歩行やバルブ操作などの半自律実行を実現。2015年DARPA Robotics Challengeに参加。
※2)自由度:
自由度(Degrees of freedom)は自由に変更できる変数の数で、ロボットの場合には自由に運動できる方向の数である関節軸数を意味する。
※3)畳み込みニューラルネットワーク:
画像認識などで広く用いられているニューラルネットワークの構造の一種で「畳み込み層」や「プーリング層」と呼ばれる多数の層で構成される。
※4)Choreonoid:
産総研知能システム研究部門 中岡 慎一郎 主任研究員が中心となって開発しているロボットシミュレーター。オープンソース・ソフトウエアとしてwww.choreonoid.orgで公開しており、World Robot Summitインフラ・災害対応カテゴリーのシミュレーション競技で公式シミュレーターとして使用される予定。
※5)リグレッション:
ソフトウエアの変更が意図しないソフトウエアの不具合を引き起こすこと。
※6)高精度ARマーカー:
産総研ロボットイノベーション研究センター 田中 秀幸 主任研究員が開発した、ARマーカーと2個の可変モアレパターンにより、正対時の観測でも高精度な姿勢推定が可能なマーカー。
※7)胴縁:
石膏ボードをビス止めするため、柱と柱の間に横向きに渡して打ち付けられた幅の狭い木材。