
自動運転の民主化を目指すティアフォー![]() ( TIER Ⅳ )は5月2日、トラック運転者不足で物流クライシス問題となっている日本国内の輸送環境を鑑み、トラック運行による高速道路上の自動運転システムを先行開発。早くも2024年度から新東名高速道路に於ける実証実験を開始すると世界に向けて発表した。
( TIER Ⅳ )は5月2日、トラック運転者不足で物流クライシス問題となっている日本国内の輸送環境を鑑み、トラック運行による高速道路上の自動運転システムを先行開発。早くも2024年度から新東名高速道路に於ける実証実験を開始すると世界に向けて発表した。
またその開発成果をリファレンスデザインとして商用車メーカーへ提供。高速道路でのトラックの自動運転機能の早期導入を支援する。また、自動運転支援環境やデータ連携基盤を含むインフラの活用にも注力。物流業界に於けるデジタル化の推進に貢献していく。
開発成果となるリファレンスデザインには、オープンソースの自動運転ソフトウェアである「Autoware( Autowareは、The Autoware Foundationの登録商標 )」の基本機能に加え、2024年4月に開始した「TIER IV Autoware Partner Program」の参画企業との協業で得られる高速道路トラックに特化した機能も含まれる。
今回の実証実験では、独・driveblocks![]() (ドライブ ブロック)の技術を活用して自動運転システムの開発を進める予定。具体的には、長距離・広域の高速道路環境に対応するために、高精度地図を必要としない認識技術を導入する。
(ドライブ ブロック)の技術を活用して自動運転システムの開発を進める予定。具体的には、長距離・広域の高速道路環境に対応するために、高精度地図を必要としない認識技術を導入する。
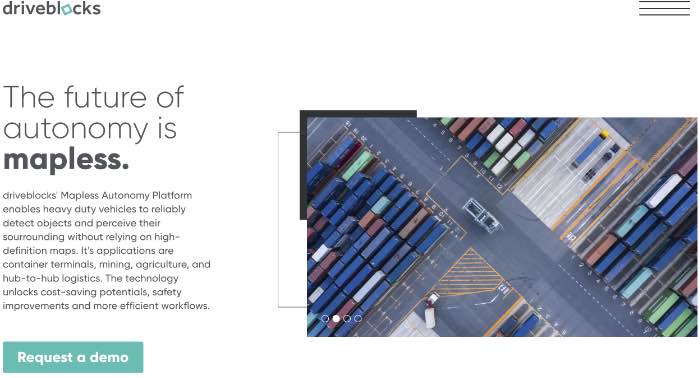
上記driveblocksは、ミュンヘン工科大学発の技術系スタートアップ。マルクス・リーンカンプ教授が始めた研究プロジェクト「Autonomous Racing」がその源流となる。2021年12月に独ミュンヘン市・北近郊のガーヒング( Garching bei München )で設立された。
その技術は、トランスフォーマーニューラルネットワークとセンサフュージョン技術を組み合わせることで、高度な環境モデルの構築を行えることを強みとしている。具体的には、モジュール式Mapless Autonomyプラットフォームを使用することで大型車両が高精度地図に依存せずに物体を確実に検出。
包括的な機能を備えたソリューションを構築、周囲を認識できるようになると謳っているもの。低コストで安全かつ迅速に、鉱山やコンテナターミナル、高速道路など、様々な用途での自動化を実現するという。
なお、この技術の有効性は、既に欧州のブレンナー峠など走行難易度の高い環境で実証されており、国内の新東名高速道路を想定したテストコースおよびシミュレーション環境を活用して検証が進んでいる。
今回は、ティアフォーとdriveblocksの技術の統合により、高速道路の工事や新設区間など、高精度地図の未整備や最新データの未反映がある場合でも、冗長性と安全性の高い自動運転の実現が可能になるという。こうした柔軟性がオープンソースの強みであるとティアフォーでは説明している。
driveblocksの機能モジュールの実証結果
ちなみにdriveblocksでは、モジュール式Mapless Autonomyプラットフォームを使用することで大型車両が高解像度の地図に依存せずに物体を確実に検出。その周囲を認識できるようになると謳っているもの。
両社は2024年度内の実証実験に向けて、高速道路の一般的なシナリオに加えて、衛星測位システムが利用できないトンネルや低照度の環境など、様々なシナリオ下で時速100キロメートルでの正確な認識機能の動作検証や走行車線のモデル作成を完了させ、リファレンスデザインとして提供する。
またティアフォーでは、高速道路トラックが合流車両や障害物などの周囲を認識し、安全に走行できるよう、物体検出機能の向上にも注力していく。
国内での実証状況:前方カメラから検出された車線マーキング(左)と検出された道路の鳥瞰図(右)
これらの取り組みを通して、ティアフォーは、物流業界が直面するドライバー不足の課題解決に向け、高速道路トラック向け自動運転システムの基本機能の開発とリファレンスデザインの提供を促進させ、これにより、物流業界におけるデジタル化を推進し、高速道路トラックを含む自動運転の社会実装に貢献していくと結んでいる。
会社概要
社名:株式会社ティアフォー
所在地:東京都品川区
URL:https://tier4.jp![]()
設立年月:2015年12月
主な事業内容:
・自動運転プラットフォーム開発事業
・自動運転ウェブサービス開発事業
・自動運転システム開発キット販売事業
・自動運転技術の教育事業