
自動運転の民主化を社是に掲げるティアフォー![]() (TIER Ⅳ)は10月17日、東京大学大学院工学系研究科松尾・岩澤研究室で研究成果の開発・実装を担う松尾研究所と、自動運転レベル4の運行設計領域(Operational Design Domain:ODD)を飛躍的に拡大させるための生成AI開発を開始した。
(TIER Ⅳ)は10月17日、東京大学大学院工学系研究科松尾・岩澤研究室で研究成果の開発・実装を担う松尾研究所と、自動運転レベル4の運行設計領域(Operational Design Domain:ODD)を飛躍的に拡大させるための生成AI開発を開始した。
松尾研究所は国立大学法人 東京大学 工学系研究科 松尾・岩澤研究室に伴走し、大学を中心としたイノベーションを生み出す「エコシステム」を作り、大きく発展させることを目的に設立された。松尾・岩澤研究室の「研究」の成果・技術の「開発・実装」を行い、広く社会に普及を目指し、日本の産業競争力の向上に貢献している。
今回のプロジェクトでは、大量の走行データを学習して実世界の運転行動の常識を模倣できる大規模世界モデルを構築することで、事前に定義したルールが適用できない状況に於いても、周囲の環境情報から適切な運転行動を生成可能なEnd-to-End AIを実現できるという。
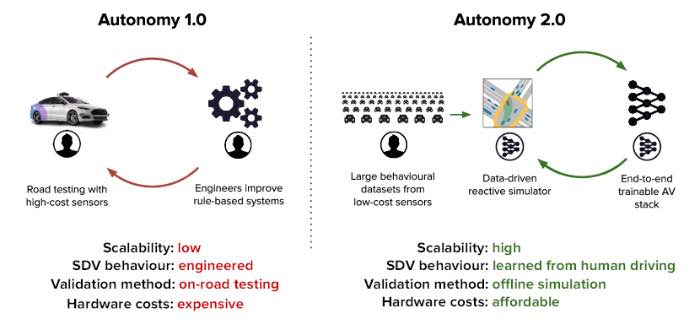 自動運転1.0と自動運転2.0
自動運転1.0と自動運転2.0
また、最新の生成AIと従来のロボット工学を組み合わせたハイブリッドなフレームワークを設計することで、商用車から自家用車まで様々な車種に対応でき、かつ高速道路から市街地まで様々な環境に対応できる自動運転ソフトウェアを実現。これらの成果はすべてオープンソースとして公開する予定としている。
自動運転レベル4に対する従来のロボット工学的なアプローチでは、認知・判断・操作に係る様々な機能モジュールを組み合わせるために、事前定義された高精度地図や詳細なルールの記述が必要だった。
このようなアーキテクチャは自動運転1.0と呼ばれ、ティアフォーが開発を主導する自動運転用オープンソースソフトウェア「Autoware」にも採用され、国内外の様々な自動運転レベル4の製品サービス開発で実績を重ねてきた。
一方、近年では、認知・判断・操作に係る様々な機能モジュールと同じ効果を1つのEnd-to-End AIモデルで実現できるようになり、そこに従来のロボット工学的なアプローチも織り交ぜた自動運転2.0アーキテクチャが登場し、自動運転レベル4のODD拡大に繫がっている。
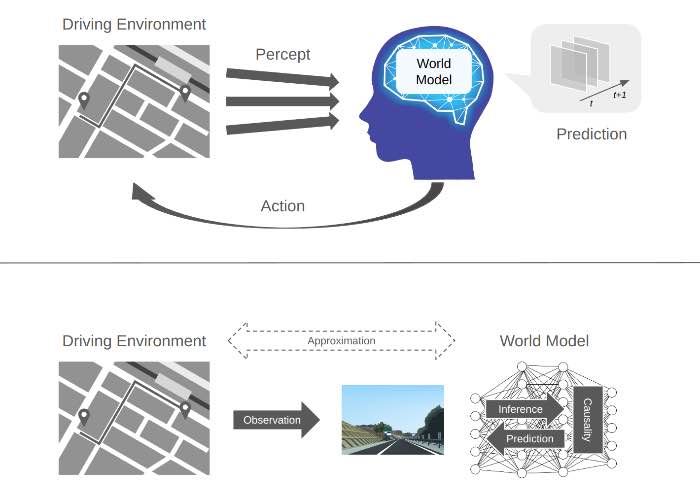 世界モデルの概要
世界モデルの概要
ティアフォーと松尾研究所は、2020年から自動運転に向けたAI技術開発に関する協業を開始し、生成AIによるアプローチとロボット工学によるアプローチの両方の研究開発を進めてきた。
同プロジェクトでは、それらの成果を活用した大規模世界モデルに基づくEnd-to-End AIを実現し、オープンソースソフトウェアとして公開することにより、自動運転2.0の民主化を目指す。また、以下に示す社内外の複数のAIプロジェクトと連携し、更なる付加価値を提供していく。
- ニューラルシミュレータによるEnd-to-End AIの学習および評価
- 協調的機械学習基盤(Co-MLOps)を用いた大規模データによるEnd-to-End AIの学習
- Cars That Think and Talk(CT3)をインタフェースとしたEnd-to-End AIの動作説明
これらに加えて、ティアフォーは、次世代の自動運転2.0アーキテクチャとして、確実な安全性担保のために詳細なルールが記述できる従来のロボット工学的なアプローチと複雑な場面での可用性担保のためのEnd-to-End AIを統合したハイブリッドフレームワークの設計に取り組む。また、この開発成果を「Autoware」に組み込み、2025年中に公開する予定。
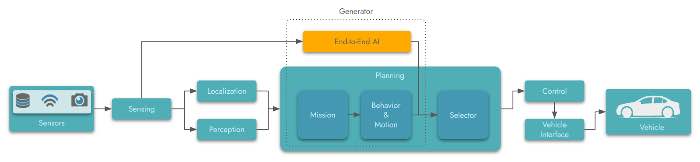 自動運転2.0に向けたハイブリッドフレームワークの設計
自動運転2.0に向けたハイブリッドフレームワークの設計
この取り組みについてティアフォー 代表取締役社長CEO加藤真平氏は、「生成AIの進化は目覚ましく、自動運転2.0を実現するための重要な鍵となっています。AI開発を強みとする松尾研究所と自動運転技術開発を強みとする当社の強力なタッグにより、ロボットタクシーを始めとした自動運転の社会実装をより加速することができると信じています。また、「Autoware」の開発を主導する会社として、この最先端の技術をオープンにすることでコミュニティ全体での技術開発を推進していく世界を目指します」と述べている。
また株式会社松尾研究所 技術顧問の松尾豊氏は、「世界モデルは、人間の外界に関する知的能力をモデル化した技術であり、複雑な実環境下での安全な移動を実現する自動運転に欠かせない要素といえます。本プロジェクトを通じて、安全で快適なモビリティの実現に貢献できることを期待しています」と語っている。
社名:株式会社ティアフォー
所在地:東京都品川区
URL:https://tier4.jp![]()
設立年月:2015年12月
主な事業内容:
・自動運転プラットフォーム開発事業
・自動運転ウェブサービス開発事業
・自動運転システム開発キット販売事業
・自動運転技術の教育事業
社名:株式会社松尾研究所
所在地:東京都文京区
URL:http://matsuo-institute.com![]()
設立年月:2020年2月