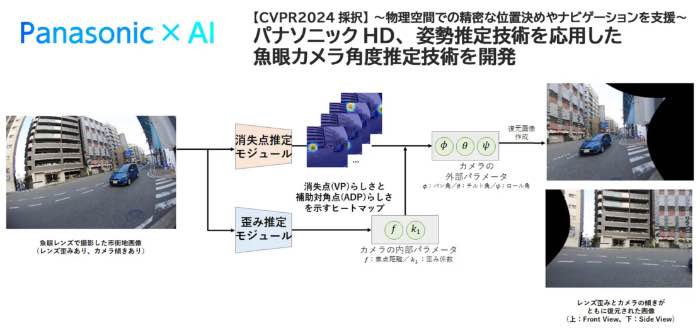
パナソニック ホールディングス(パナソニックHD)は6月5日、物理空間での精密な位置決めやナビゲーションなどに欠かせない魚眼カメラの角度を、画像1枚から頑健かつ高精度に推定できる新たなカメラ校正技術を開発した。
自動車やドローン、ロボットなどの自動運転における位置決めやナビゲーションは、高精度に機器の進行方向が推定できることを前提としている。
そのため通常、カメラに加えてジャイロなどの専用の計測システムが使用されるが、小型軽量化や低コスト化のためには、カメラの撮影画像のみで高精度に機器の進行方向を割り出す技術が求められる。
そこでパナソニックHDは、広範囲の映像を撮影できるという特徴から、広範囲監視や障害物検知など幅広い用途で用いられている魚眼カメラに於いて、レンズ歪みにより困難とされている角度推定の課題を解決する技術を開発した。
具体的には、建物、道路などの人工物は互いにその面が直交すると仮定する「マンハッタンワールド仮説」の考え方のもと、姿勢推定に用いられるネットワークを応用することで、レンズ歪みの大きい画像に対しても、頑健かつ高精度にカメラ角度を推定できる技術になる。
こうした手法は市街地の一般的な画像1枚からカメラ校正を行えることから、自動車やドローン、ロボットなどの移動体を用いた多岐に亘る用途での応用が期待できるという。
なお同技術は、パナソニックグループのトップ人材育成プログラムREAL-AIの研究成果として、2024年6月17日から6月21日に米国シアトルで開催されるAI・コンピュータビジョン分野における世界最高峰の国際会議のひとつIEEE/CVF Conference on Computer Vision and Pattern Recognition(CVPR)2024の本会議で発表される見込みだ。