
中日本高速道路(NEXCO中日本)と日本電気(NEC)は7月26日、除雪車の梯団走行(※)について、自動運転化に向けた技術開発に共同着手したことを発表した。両社は、2024年度内を目標に、自立走行・車間距離保持技術の完成を目指し、試験走行や検証などを実施していく。

1.開発の背景と目的
NEXCO中日本などの高速道路運営会社では、降雪時でも安全な利用ができるよう、吹雪による視界不良などの悪条件のなか、除雪車の梯団走行(※1)により、複数車線の除雪作業を行っている。
梯団走行の除雪作業では、除雪車の先頭車両と後続車両が一定車間距離を保ちつつ、前面に装着した排雪板を少し重ねて走行する必要があることから、除雪車1台につき熟練した運転技術を有する者と除雪操作装置や周囲確認などを行う者の計2名が乗車しているが、高齢化や労働人口減少により、除雪車の運転技術者の担い手不足が顕在化。
今回、NEXCO中日本は、除雪車の梯団走行に関する少人化・省力化を目的に、NECと共に自動運転化に向けた技術開発に着手した。
なお、この取組みは、NEXCO中日本の技術戦略の中の技術目標の1つであるである「自動運転の普及を支援し、技術を活用する」の達成に向けたもので、推進している「i-MOVEMENT(アイムーブメント/※2)」の中のメンテナンス改革の1つである「雪氷車両の機械化による省力化」につながる技術になると云う。
※1)梯団走行:複数の車両が連ねて走ること(タイトル写真は、梯団走行による除雪作業の様子)。
※2)i-MOVEMENT(アイムーブメント):innovative -Maintenance & Operation for Vital-Expressway Management with Efficient “Next generation” Technology (次世代技術を活用した革新的な高速道路保全マネジメント)。最先端のICT技術・ロボティクスの導入により、人口減少などの高速道路を取り巻く環境の激変に対応しつつ、高速道路モビリティの進化を目指すNEXCO中日本の活動(ムーブメント)を指す。
2.技術開発の特徴
今回の技術開発では、高速道路で大型車両の自動運転技術を開発し、実証実験が実施されてきた経済産業省と国土交通省による「高速道路におけるトラックの後続車無人隊列走行技術(隊列走行技術)」を基に開発を進める。
<開発のポイント>
(1)各除雪車が異なる走行軌跡を自立走行(自立走行技術)
これまでの隊列走行では、先行車両の後ろを後続車両が同じ走行軌跡を追従する(電子牽引イメージ)技術が用いられてきたが、梯団走行では各車両の走行軌跡が異なるため、今回の開発では、全車両が高精度な衛星測位により自車位置を正確に把握し、道路線形データにより車両ごとに異なる走行軌跡を自立走行することを可能とする。
(2)後続車両が先行車両と異なる軌跡を適切な車間距離を保ちながら走行(車間距離の保持技術)。
これまでの隊列走行では“LiDAR(Light Detection And Ranging)”により先行車両との距離を計測し、車間距離を計測しながら追従技術との組み合わせることで車間距離を制御していたが、除雪時、LiDARは雪の反射により正確な距離計測が困難になることが想定されるため、今回の開発では、各車両の位置、速度を車車間通信のデータを用いることで、車両相互の位置関係を把握し、適切な車間距離を保ちながら梯団走行を可能とする。
3.開発状況
除雪車は、除雪作業開始前に隊列走行状態から梯団走行状態に展開し、梯団走行による除雪作業を行い、除雪作業終了後に梯団走行状態から隊列走行状態に収束する(表1)。
現在は、この隊列→梯団→隊列の走行形態に於ける先頭車両のハンドル操舵と2番目・3番目車両のハンドル操舵・速度制御について、人の手を介さずプログラム制御する試験走行を開始している。
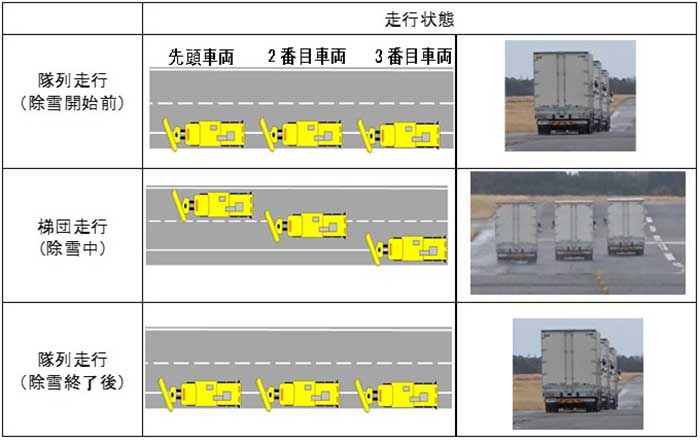 梯団走行の展開と収束のイメージ。
梯団走行の展開と収束のイメージ。
4.期待される効果と今後の展開
NEXCO中日本とNECは、今回の技術開発に於いて、2024年度内を目標に自立走行技術および梯団走行時の車間距離保持技術の完成を目指す。また、開発終了後は除雪車両による試験車両を開発し、試行導入を行っていく。さらに、将来的には、除雪車の2番目・3番目車両について、除雪装置操作者などを含む運転技術者を2名から1名に減らした梯団走行の実現に向けて取り組んでいくとしている。