

慶応義塾大学![]() とUniversity of California
とUniversity of California![]() ( 米国・カルフォルニア大学 )は、9種類の自動運転用LiDAR( Light Detection and Ranging / レーザー光で3D情報を得るセンサー )の脆弱性調査を実施。そこから複数のLiDARが〝HFR攻撃( 高周波レーザー除去攻撃 )〟を受けた際、物体を認識できなくなる可能性があることを先の2024年2月13日に示した。
( 米国・カルフォルニア大学 )は、9種類の自動運転用LiDAR( Light Detection and Ranging / レーザー光で3D情報を得るセンサー )の脆弱性調査を実施。そこから複数のLiDARが〝HFR攻撃( 高周波レーザー除去攻撃 )〟を受けた際、物体を認識できなくなる可能性があることを先の2024年2月13日に示した。
より具体的には、慶應義塾大学理工学部電気情報工学科の吉岡健太郎専任講師らと、University of California, Irvine![]() ( カルフォルニア大学アーバイン校 )のAlfred Chen( アルフレッド・チェン )助教授、同校博士課程学生の佐藤貴海氏らが共同で、自動運転用のセンサーが持つ脆弱性に焦点を当てた初の網羅的セキュリティー調査を実施。自動運転用LiDARへ対して、どのような対抗策が必要かを明らかにした。
( カルフォルニア大学アーバイン校 )のAlfred Chen( アルフレッド・チェン )助教授、同校博士課程学生の佐藤貴海氏らが共同で、自動運転用のセンサーが持つ脆弱性に焦点を当てた初の網羅的セキュリティー調査を実施。自動運転用LiDARへ対して、どのような対抗策が必要かを明らかにした。
今日の自動運転技術は、未来の移動環境を変革する潜在能力を秘めていることが見え始めているが、その一方で、自動運転技術を支えるセンサーの安全性を如何に確保するかが問われている。その現行技術が大きく進展する時期にあり、センサー妨害への対応は待ったなしの状況にある。
そうしたなか同研究成果は、自動運転車両のセンサーセキュリティー問題に新たな警鐘を鳴らすと共に、その防御策の開発に繫がる方策は初めて示唆するものとして注目かつ期待を集めている。
研究成果は、2024年2月26日( 米国太平洋時間 )から開催のセキュリティー分野のトップ国際会議「Network and Distributed System Security( NDSS )」に採択され、その論文が掲載される。なお今回、明らかになった脆弱性については、各LiDARメーカーへ共有し、一定の対策期間を経た後に研究成果が公開される。
その研究と成果、対策に係る主要ポイントは以下の通り
( 但し以降は概説のため、詳しく内容を閲覧したい場合は、以下のURLリンク< PDF582KB >をDLされたい。https://www.keio.ac.jp/ja/press-releases/files/2024/2/13/240213-1.pdf![]() )
)
1.研究のポイント
・新しい脆弱性の発見:同研究チームは、攻撃者が自動車用LiDARへ高周波レーザーを照射することで、センサーが捉えていた物体を広範囲に消去したり、偽装データを注入したりするような攻撃が可能であることを発見した。また、こうした攻撃は、最新のLiDARにも有効であるため、既存の安全対策が必ずしも有効でないことも示している。
2.研究背景
自動運転車両の開発でLiDARは中核的役割を担っている。しかし悪意ある攻撃者がLiDARの脆弱性を突き、攻撃レーザーにより虚偽データを注入してLiDARを欺すことで、存在しない物体を偽装することもでき、自動運転車両の安全性が脅かされる可能性がある。従って、これら潜在的な脅威に対抗できる効果的な対策を見つけることは急務だった。
3.研究内容・成果
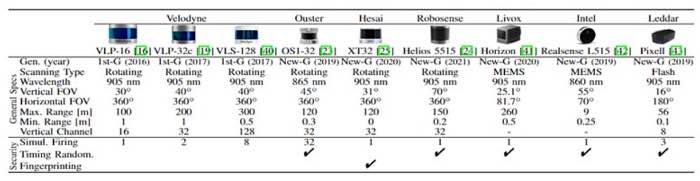 図 1: 実施した網羅的な脆弱性調査
図 1: 実施した網羅的な脆弱性調査
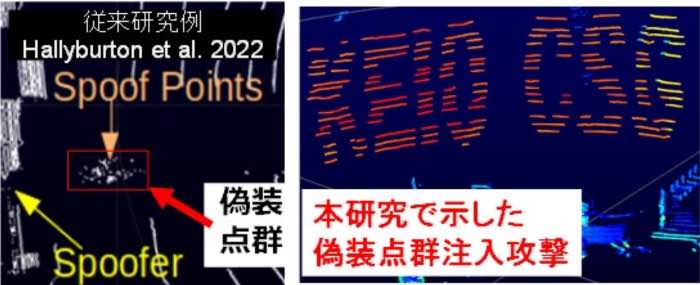 図 2: 偽装データ注入攻撃の実証
図 2: 偽装データ注入攻撃の実証
そこで研究チームはLiDARの潜在的な脅威に対する初めての網羅的なセキュリティー調査を実施した。特に攻撃者が偽装データを注入したり、物体を消去したりする可能性に焦点を当てた。
具体的には( 図1 )に示す通り、新旧合わせて9種類のLiDARを用いた大規模な脆弱性調査を行い、なかでも次世代LiDAR( システムオンチップ<SoC>と呼ぶアプローチを用いて光検出器や読み出し回路などの全てのコンポーネントを単一のチップに搭載した新タイプのLiDAR )は、旧世代のLiDARとは異なる「HFR攻撃(高周波レーザー除去攻撃)」に対する脆弱性特性を持つことを発見した。
また併せて初期世代のLiDARに対して、同期攻撃により精微な偽装物体の注入攻撃が可能であることも示した( 図2の中の”KEIO CSG”といった文字に示す )。このような攻撃能力を明らかにすることで本質的な防御策が立てられるようになった。
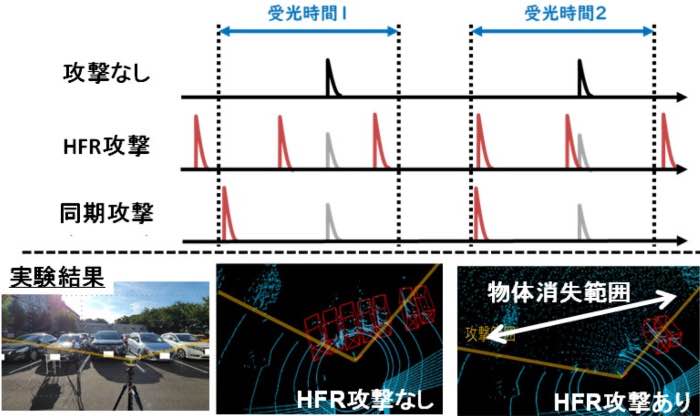 図 3: HFR攻撃の特徴と実験結果
図 3: HFR攻撃の特徴と実験結果
これらは市街地に於ける運転といった現実に近い攻撃シナリオ下でも有効で、攻撃適用範囲も広いという特徴がある。 図3の下部に示す通り、太陽光が多く攻撃難度が高い真夏の野外での実験でも、80度以上の水平範囲の物体を消失させることができる。
4.今後の展開
今研究成果では、多種多様のLiDARセンサーに対する脆弱性について新たな理解を提供し、既存のLiDARセキュリティーの認識に新たな視点を加えることになった。
今後、研究グループはこの研究で明らかにした脆弱性に対抗する防御策の開発に注力する。それらは悪意のあるレーザー攻撃に対するLiDARの耐性を向上させる技術や、偽装データの注入を防ぐ新たなアルゴリズムの開発を進める予定という。
更に異なる種類のセンサー( レーダーやカメラなど )との組み合わせによる安全性向上の可能性も探求する。そして最終的に全世界の自動運転車両のセキュリティー強化。社会全体への安心・安全の提供に貢献することを目指すと結んでいる。
5.当該プロジェクトについて
同研究は、科学技術振興機構( JST )戦略的創造研究推進事業 さきがけ「社会変革に向けた ICT基盤強化( JPMJPR22PA )」の一環として行われた。
<参考文献>
[1] Yulong Cao et al., You Can’ t See Me: Physical Removal Attacks on LiDAR-based Autonomous Vehicles Driving Frameworks, Usenix Security‘23
[2] Yulong Cao et al., Adversarial sensor attack on lidar-based perception in autonomous driving, ACM CCS‘19
<原論文情報>
国際学会名:NDSS Symposium 2024
タイトル:LiDAR Spoofing Meets the New-Gen: Capability Improvements, Broken Assumptions, and New Attack Strategies
著者と所属:Takami Sato1*, Yuki Hayakawa2*, Ryo Suzuki2*, Yohsuke Shiiki2*, Kentaro Yoshioka2,Qi Alfred Chen1
*: 共同第一著者
1: University of California, Irvine
2: Keio University