
自動運転車の安全性に数学的証明を与える新手法を開発。自動運転の社会受容を加速
情報・システム研究機構 国立情報学研究所( N I I/エヌアイアイ、拠点:東京都千代田区、所長:喜連川優/きつれがわまさる)と、科学技術振興機構( J S T/ジェイエスティー、拠点:東京都千代田区、理事長:橋本和仁/はしもとかずひと)並びに、N I Iアーキテクチャ科学研究系教授・蓮尾一郎(はすおいちろう)らの研究チームは、自動車の自動運転システムの安全性に強い数学的保証を与える技術に立脚した基礎理論を開発した。( 坂上 賢治 )
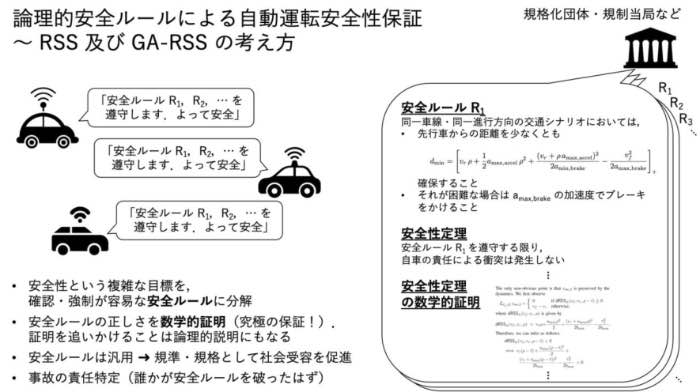
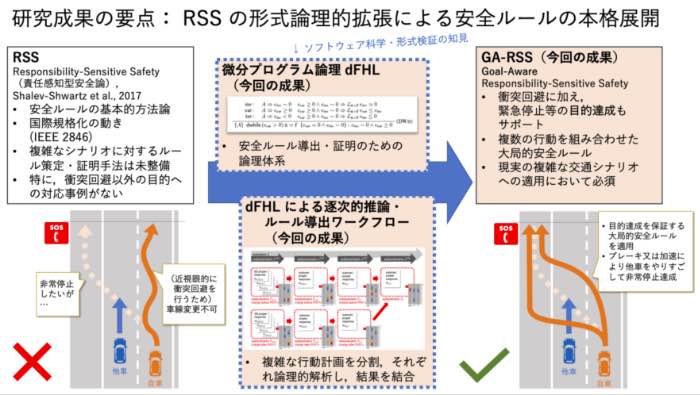
同研究では、自動運転安全性の数学的証明のための既存の方法論「RSS(責任感知型安全論、responsibility-sensitive safety)」に注目し、その応用範囲を大きく拡大。実世界へ本格展開できるよう拡張した手法「GA-RSS(goal-aware RSS)」を確立した。
この形式論理学(数学における証明を研究の対象とする数学の一分野)の知見を用いた今回の拡張によって、非常停止などの目標達成を求める複雑な運転シナリオに対しても、安全性の数学的証明が可能となった。
なお同研究は、科学技術振興機構 戦略的創造研究推進事業 ERATO 蓮尾メタ数理システムデザインプロジェクト(JPMJER1603)の一環で行われ、研究成果は2022 年 7 月 5 日(米国東部時間)に IEEE Transactions on Intelligent Vehiclesのオンライン版上で公開された。
そのポイントは、まず自動車の自動運転を社会が受け入れるためには、安全性の保証とトレーサブルな(論理的議論を追跡できる)説明が必須である事。この数学的証明は、厳密な安全性保証であり、究極の安全性保証のかたちである事を示さねばならない。
しかし、実際の自動運転システムへの適用は簡単ではない。しかし今回、既存の方法論「RSS(責任感知型安全論、responsibility-sensitive safety)を形式論理的に拡張し、安全ルール導出のためのソフトウェアサポートを設計した事により、複雑な運転シナリオでも安全性の数学的証明が可能になった。