

本田技研工業株式会社(本社:東京都港区、社長:八郷隆弘)は2019年1月8日(火)から11日(金)まで米国ネバダ州ラスベガス市で開催される世界最大級の家電見本市「CES 2019」に出展し、自社がオープンイノベーションで取り組む技術を紹介すると共に、当地に於いて研究開発・事業化パートナーを募っていく構え。(坂上 賢治)

そんな本田技研工業のCSE2019出展の狙いは「研究開発・事業化パートナーとの出会い」と位置付けており同社は、「すべての人に『生活の可能性が拡がる喜び』を提供することを目指しており、ロボティクス・モビリティー・エネルギーの3つを重点領域と定めて、新たな価値の創造に取り組んでいます」と話す。
翻ると本田技研工業は、先のCES 2017で新価値創造に向けたオープンイノベーションの呼びかけを行い、CES 2018では重点領域の一つ、ロボティクスの方向性を提示した。
今回、これらのコンセプト発信を経たCES 2019の会場では、ロボティクス・モビリティー・エネルギー領域で自らが開発中の具体的な技術を出展し、研究開発の促進・事業化に向けたパートナーを募っていくのだという。
具体的には、『研究開発パートナーを募る技術』としては3分野を掲げている。以下はこれら分野と出展概要とを併せて紹介していく。
【ロボティクス分野・自律移動機能開発】
まずそのひとつは「ロボティクス分野」での3案件。まず同分野での第1項は、オートノマス ワーク ビークル(Honda Autonomous Work Vehicle)での自律移動機能開発企業並びに、屋外での自律移動モビリティー活用を検討する企業・団体を求める。
これに関わる出展内容は「オートノマス ワーク ビークル(Honda Autonomous Work Vehicle)」であり、これは、アタッチメントを取り付けることでさまざまな用途に活用できる、自律移動モビリティーのプラットフォーム。車両仕様は全長1940mm・全幅1110mm・高さ900mm、重量350kg、最大積載量454kg、最大牽引重量590kgとなっている。

このオートノマス ワーク ビークルは、CES 2018に出展した「3E-D18」をベースに開発されており、CES 2018への出展を切っ掛けに、2018年から米国でパートナーとの実証実験を開始した。
今は、米国ノースカロライナ州の大規模太陽光発電所での除草作業、カリフォルニア州のカリフォルニア大学デービス校における試験農場のモニタリング作業、コロラド州の消防隊の機材搬送や山火事など危険な場所での偵察・通信サポートという3つの実証実験を行っている。
【ロボティクス分野・人との共存移動ロボット】
続くロボティスク分野での第2項は、人との共存移動ロボットであるパスボット(Honda P.A.T.H. Bot)を利用しての公共空間で移動型ロボットの活用を検討する企業・団体を求める。

テーマとなるパスボットは、周囲の状況を認識して、人や障害物を避けながら目的地まで最適ルートで移動するAI搭載のロボット。ロボティクスデバイスが人と共存・協調し、人の可能性を拡大していく社会を目指している。なお名称内の「P.A.T.H. 」はPredicting Action of The Humanの略である。その使用は高さ1050mm、重量21.5kg、最高速度時速6kmだ。
パスボットは、ロボティクスデバイスを実社会で活用するために必須となる人に不安を与えず、人の行きかう公共空間をスムーズに移動する機能を搭載した。今後は機能の付加による様々な用途への活用を想定し、公共空間での移動型ロボットの可能性を共に探索していくため、実証実験パートナーを求めている。
【ロボティクス分野・蓄積・通信・ロボット間連携】
さらにロボティスク分野での第3項として、ラース プラットフォーム(Honda RaaS Platform)でロボティクスデバイス開発企業や、ロボティクスサービスやソリューションの開発企業を求める。
ここに該当するのは「Honda RaaS Platform(ラース プラットフォーム)」で、データ蓄積・共有、通信制御、状態遷移、ロボット間連携などの共通機能をAPIやSDKといったインターフェースやパッケージとして提供することで、ロボティクスソリューションの開発を容易にするソフトウェアプラットフォームコンセプトである。ちなみにHonda RaaS PlatformのRssSはRobotics as a Serviceの略を内包させているもの。
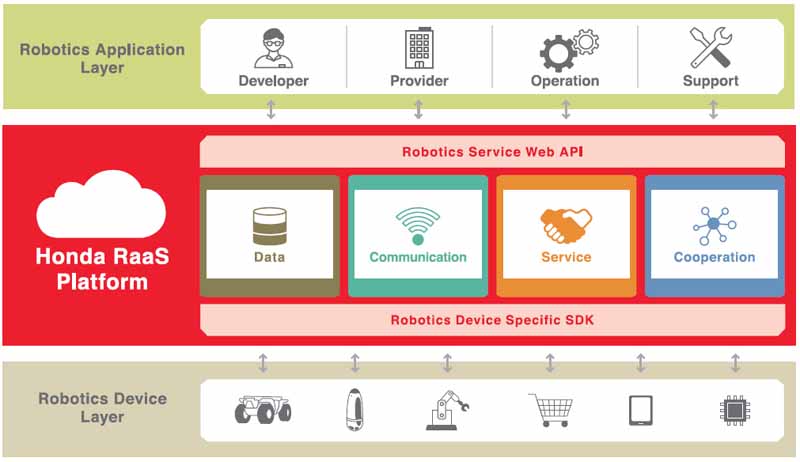
本田技研工業では、開発パートナーのロボティクスデバイス、システム、アプリケーションなどを連携させることで、これまでに無い、シームレスなロボティクスサービスの実現を目指している。
そこで同技術の実現に向け、ロボティクスデバイス開発企業、ロボティクスソリューション・プロバイダーなど、ロボティクスサービスを一緒に創造していくパートナーを求める。
【モビリティ・ネクテッドカー関連】
ロボティクスに続くふたつめの分野では「モビリティー分野」を挙げている。これについてはセーフ スウォーム(SAFE SWARM)案件としてコネクテッドカーや自動運転関連技術の開発企業、または実証実験を共同で実施する自治体を募る。
コネクテッドカー技術(ネット接続型や車車間/路車間通信自動車技術)を活用し、安全でスムーズな交通の流れの実現を目指す技術コンセプト。
車車間/路車間通信でデータをやり取りすることにより、見通しの悪い交差点進入時の衝突を回避したり、合流時や車線変更時のスピードを分析し、適切なスピード・タイミングでの合流・車線変更をアシストすることで渋滞発生を防ぐなど、大群でも互いにぶつからずに泳ぐ魚の群れ(Swarm)のように、交通全体の流れを安全かつスムーズにすることを目指す。
これもCES 2017で先行してコンセプトを発表しており、2018年初頭より、通信機を搭載した車両を使って米国オハイオ州コロンバスからメアリズビルに向かう州道33号線にて実証実験を行ってきた。
また同州メアリズビルでは、信号にカメラ・センサー・通信機を備え付けて車と通信するSmart Intersection(スマート インターセクション)の実証実験も開始している。
今後、実証実験をさらに加速させるため研究開発パートナーを求めており、ITS(Intelligent Transport Systems:高度道路交通システム)やCAV(Connected and Automated Vehicle:コネクテッドカー・自動運転車)に関わる企業と、実証実験を共同で実施する自治体のプロジェクト参画を募る。
【エネルギー・電力コントロール】
最後の分野は「エネルギー分野」で、具体的にはワイヤレス ビークル トゥ グリッド(Wireless Vehicle-to-Grid)領域で、電力アグリゲーター、またはエネルギー関連企業からの研究パートーナーを求める。

電気自動車やプラグインハイブリッド車などをワイヤレスで電力系統(グリッド)につなぎ、バッテリーに貯めた電力をグリッドの需要と供給の調整用電力として活用することで、電力需供のバランスを保ち、グリッドの安定化に貢献する技術。
供給が不安定な再生可能エネルギーの導入促進に貢献するとともに、新たなビジネスモデルの創出を目指す。
なお昨今では、車両底面と駐車場床面に取り付けたパッドにより、ワイヤレスで車両とグリッド間で充放電ができるシステムで、非接触充電技術を開発する米国のベンチャー企業「WiTricity(ワイトリシティ)」と共同研究を行っており、同社ソリューションでパッドの上に車両を駐車するだけで充放電が可能なため、利便性を飛躍的に向上させることができる上、将来的には自動運転車両への適用も可能になるという。
今後も実用化に向け、電力アグリゲーターや電力会社など、エネルギー関連企業との連携を目指す。
一方、『事業化パートナーを募る技術』としては、ロボティクス領域でのオムニ トラクション ドライブ システム(Honda Omni Traction Drive System)をキー技術に、前後・左右・斜め360度自由に移動できる車輪機構に関心のある企業を求め、その体現物として今回、Honda Omni Traction Drive System(オムニ トラクション ドライブ システム)を出展した。

これはロボティクス研究から生まれた、前後・左右・斜め360度自由自在に移動できる自社独自の車輪機構。
パーソナルモビリティー「UNI-CUB(ユニカブ)」の車輪機構として使用されており、UNI-CUBとして8万人以上の体験実績(2018年12月時点)がある。
本田技研工業は、この技術のさまざまな分野への応用を目指しており、移動機構としてのみならず、新たな付加価値を求めるパートナーとのコラボレーションも進め、可能性を広げていきたいと考えているのだと話す。

その先駆けとして、日本電産シンポ株式会社との共同の取り組みによりHonda Omni Traction Drive Systemの同社でのライセンス生産を開始。同社の無人搬送台車「S-CART(エスカート)」に搭載して2019年初頭に実用化予定だという。
またモビリティー 領域では、ドリーム ドライブ(Honda Dream Drive)をキー技術に車載アプリを通して自社サービスを提供したい企業を求めていく意向だ。

ドリーム ドライブは、Honda Developer Studioがパートナー企業とともに開発に取り組むドライバー向け、パッセンジャー向けのアプリケーション。CES 2017で発表した「In-Vehicle Payment」「Dream Drive」という2つのコンセプトを元に、開発を進めてきた。
Honda Dream Drive: Driver(ドライバー向けのアプリケーション)は、車載ナビゲーションを通じて、レストランの予約、映画チケットの購入、コインパーキングやガソリンスタンドでの支払いなどをクルマに乗ったまま行うことができる。
Honda Dream Drive: Passenger(パッセンジャー向けのアプリケーション)は、スマートフォンやタブレット上で、映画や、車の動きに合わせて進行するゲームなどを楽しめることを目指すが、こうしたアプリケーション環境の実用化に向けて、さらなるパートナー企業の参画を求めていく。
加えて締めとなるものに「Honda Xcelerator(エクセラレーター)」がある。これはプログラムでオープンイノベーションを行うスタートアップ企業とその技術のことを指す。
例えばPerceptive Automata(パーセプティブ オートマタ)は、米国マサチューセッツ州に拠点を置くスタートアップ企業で、車載カメラの情報をリアルタイムで分析することで、路上の歩行者や自転車、他のドライバーの心理状態を認識し、次の行動を予測するソフトウェアの開発を行っている。これにより本田技研工業は、安全でスムーズな自動運転技術の開発を目指す。

一方、Noveto(ノベト)は、イスラエルに拠点を置くスタートアップ企業。独自開発の指向性スピーカーを使って、ドライバーにクルマの周囲の状況を音で知らせる3Dオーディオテクノロジーを開発している。
後方や側方などの見えづらい方向にいる車両や歩行者などの存在を音で知らせることで、安全運転を支援する技術だ。
なお研究開発・事業化に関する窓口は以下URLとなる。< https://www.honda.co.jp/CES/2019/ ![]() >
>
CES 2019の概要は以下の通り
コンシューマー・エレクトロニクス分野では世界最大級の見本市
主 催 者:Consumer Technology Association(全米民生技術協会)
開催日程:2019年1月8日(火)~11日(金)
開 催 地:米国ネバダ州ラスベガス市
会 場:Las Vegas Convention and World Trade Center
Hondaブース位置:North Hall-7900
CES公式ウェブサイトURL(英語):https://www.ces.tech/ ![]()