群馬大学と日本電気(NEC)は、群馬県の委託を受け、関越交通の協力のもと、12月10日から25日まで、群馬大学荒牧キャンパスと渋川駅間の公道において、自動運転の実証実験を実施する。
今回、群馬大学研究・産学連携推進機構次世代モビリティ社会実装研究センター(CRANTS)とNECは、共同研究契約(適応ネットワーク制御技術(注1)・先進セキュリティ・路車協調検討)を締結し、実証実験で「適応ネットワーク制御技術」の検証を行う。
1.目的
CRANTSは、限定した地域でのレベル4自動運転(完全自律型自動運転/注2)の社会実装に向け、全国様々な地域で実証実験を行っている。
一方、NECは安全・安心な自動運転移動サービスの実現に向け、自動運転車両の遠隔制御を支援するソリューションの提供を目指している。
今回の実証実験では、これらの群馬大学とNECの知見を持ち寄り、自動運転の社会実装に向けた各種技術の検証を行う。

2.実証実験の概要
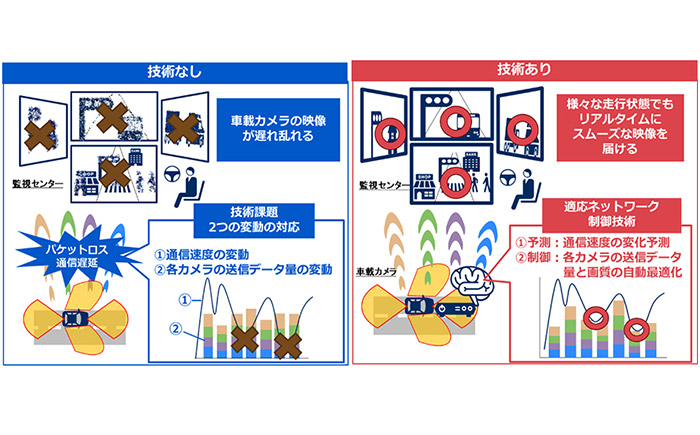
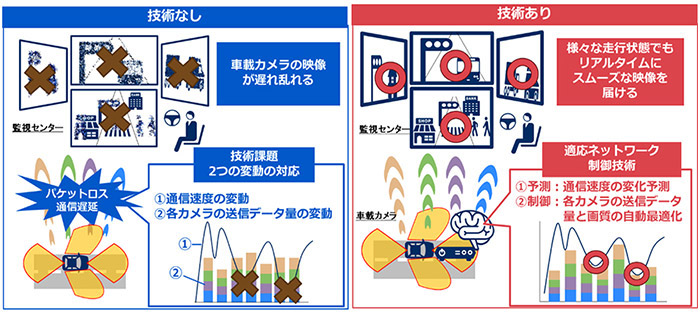
公道における自動運転では、管制センターによる車両の遠隔制御のために、複数のカメラが撮影する映像を遅延・乱れなく通信することが重要となる。
無線通信は、同じ周波数を使う利用者数の増減や、例えば自動車が多数集まる交通量の多い交差点など、車両移動に伴う電波状況の変動により、安定的な通信遅延の抑制が困難になるといった、大きな課題がある。
しかし、通信遅延が事故のリスクにつながる自動運転において、安定した通信は不可欠。
今回の実験では、公道で行う実証実験として初めてNECの「適応ネットワーク制御技術」及び「適応映像配信技術(注3)」を実験車両に搭載。通信の遅延変動を予測しながら安定した高品質な映像配信を行い、管制センターによる遠隔制御を支援する。
※実証実験では、完全自動運転を行うが、ドライバーが乗車し緊急時にはドライバーが運転を行う。
3.実証実験場所・期間
– 場所:渋川駅~群馬大学荒牧キャンパス(8.7km)
– 期間:2019年12月10日(火)~2019年12月25日(水)
注1)適応ネットワーク制御技術:通信が混雑した状況下でもリアルタイムに通信遅延を抑制し、高品質な通信・映像送信を行う技術<https://jpn.nec.com/rd/technologies/201903/index.html>。
注2:自動運転の段階(国土交通省「自動運転のレベル分け」より)は、「レベル1」が運転支援(前後左右いずれかの車両制御をシステムが実施)。「レベル2」が特定条件下での自動運転機能(レベル1の複数の制御の組み合わせ)。「レベル3」が条件付自動運転(システムが全ての制御を行うが、システムの要求に対してドライバーはこれに応じる)。「レベル4」が特定条件化における完全自動運転(気候などの条件によって制限あり)「レベル5」が完全自動運転。
注3)適応映像配信制御技術:通信帯域を予測し、適応的に映像の圧縮率とコマ数を制御する技術<https://jpn.nec.com/rd/tg/smc/research/adaptive_video_feed_control.html>。
[問い合わせ先]
・国立大学法人群馬大学 研究・産学連携推進機構
次世代モビリティ社会実装研究センター 牛口・高野
メール:crants-contact@ml.gunma-u.ac.jp
・NEC クロスインダストリー事業開発本部/モビリティソリューション事業部
春山・松田
メール:ci-service-support@zaq.jp.nec.com