
東京工業大学科学技術創成研究院バイオインタフェース研究ユニットの髙木敦士特任助教、インペリアル・カレッジ・ロンドンのエティエン・バーデット教授、東京大学大学院教育学研究科の野崎大地教授らの研究グループは、複数の人が共同で運動作業を行うとき、グループの人数が増えれば増えるほど、各メンバーの運動パフォーマンスが向上することを明らかにした。

研究の目的は、大きなテーブルを多人数で動かすような共同作業の際、集団全体でどのように動きを調整しているのかを解明すること。
今回は、コンピュター画面上をランダムに動き回るターゲットを、カーソルを動かして追いかける作業を2~4人で行い、人数が増えるほど効率が向上することを実証した。
これまで、2人で同様の作業を行うと1人だけの場合よりも効率よくできることを確認していたが、今回は人数が増えるほど、さらに運動パフォーマンスが向上することが分かった。
研究成果は2月12日に生命科学分野の国際科学誌『eLife(イーライフ)』に掲載された。
[研究成果]
髙木特任助教らの研究グループは、被験者が2人の時に作業効率が向上することを既に実証しているが、今回は2人だけでなく、3人、4人と被験者を増やした時にどうなるかを実験。
4人の場合、仕切りで分けられたブース(図1)にモニターを配置し、ランダムに動きまわる視覚ターゲットに手の動きを追従させる運動課題を一緒に行った。
視覚ターゲットは、どのブースでも同じ動きをするが、その際、ロボットインターフェース(※1)と呼ばれる特殊な装置によって被験者の手に仮想的なバネを設定し、被験者の動きの間に力学的相互作用(※2)が生じるようにした。
これにより、手の触覚を介して他人の動きを互いに検知し合うことを可能とし、これまで、2人ペアで同様の運動課題を練習すると、1人だけで練習するよりもうまく運動課題を実行できることは、確認していた(参考文献outer)。
しかし、今回の研究により、共同作業を行う人数を3人、4人と増やしていくと、運動パフォーマンスがさらに向上することが判明。
研究グループはこの理由について、被験者自身がターゲットの動きを予測するだけでなく、ロボットインターフェースを通じて得た別の被験者の力の情報を参考にすることができるからだとしている。
つまり4人の場合、自分だけでなくほかの3人がターゲットの動きをどう予測しているかの情報を得て、瞬時に最適な予測を実行できるからというわけである。
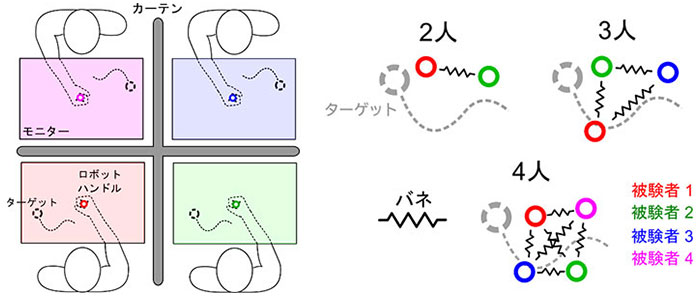
図1.ロボットインターフェースを通じて2、3、4人の集団でランダムに動くターゲットを追従させ、各被験者の追従パフォーマンスの変化を評価する。
高木特任助教は、今回の研究の結果について、以下のように話している。
「グループのメンバーが触覚情報を活用して、共同動作を素早く調整できることに非常に驚いた。
混雑した結婚式会場でテーブルを移動させようとしている状況を考えてみてください。口頭でのコミュニケーションによって、テーブルが何にもぶつからないように動作を調整することはグループの人数が増えれば増えるほど困難になるはずです。
しかし、触覚を介して互いの動作情報をやり取りすれば、人数が増えてもほんの数秒で動作を調整することができるのです」。
エティエン・バーデット教授は、以下のように評価している。
「お互いの動きが影響し合うよう連結したとき、グループの人数が増えれば、ランダムな力の影響がノイズのように働きパフォーマンスが低下するのではないかと予測していた。ところが、実際には、ノイズ量が減少するように、個々人のパフォーマンスが向上した」。
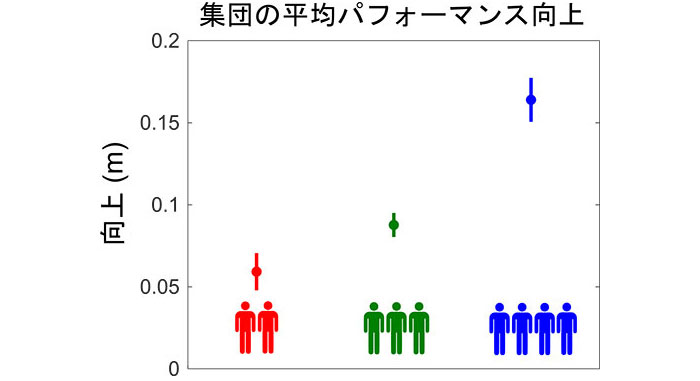
図2. 集団の平均パフォーマンスはグループの人数が増えるほど向上した。
[今後の展開]
髙木特任助教は、研究チームの先行研究で、同様な機序(メカニズム)を実装し、人間と共同で動作を行うことのできる「人間のような」ロボットパートナーを設計していたことから、「このような動作調整が可能なのは、触覚情報を通じてメンバーが互いの動作目標を推定できるためではないか」、と推測している。
今回の研究ではコンピュータシミュレーションを用いてグループのメンバー間の情報のやり取りを詳しく検討し、上記の仮説を支持する結果を得た。
高木特任助教は、「このような動作調整機序への理解が深まれば、複数のロボットが共同で作業を行うときのアルゴリズムを作り出すことも可能であると考えています」と、今後の展開について話している。
※1)ロボットインターフェース:電子モーターにより人の手に力を与える装置。手の位置、速度、力なども測る。
※2)力学的相互作用:相手の力を受けながら共同作業をこなすこと。
[論文情報]
– 掲載誌:eLife
– 論文タイトル:Individuals physically interacting in a group rapidly coordinate their movement by estimating the collective goal
– 著者:Atsushi Takagi1,2, Masaya Hirashima3, Daichi Nozaki3, Etienne Burdet2
DOI:10.7554/eLife.41328 outer
– 所属:
1:Institute of Innovative Research, Tokyo Institute of Technology.
2:Department of Bioengineering, Imperial College London.
3:Graduate School of Education, University of Tokyo.