

一般社団法人日本自動車工業会(会長:豊田 章男、以下自工会)は7月20日、 トラックの隊列走行の完全実現に向けて同工業会・会員である大型4社が積極協力。定速走行・車間距離制御装置(ACC:Adaptive Cruise Control)や車線維持支援装置(LKA:Lane Keep Assist)、さらに協調型車間距離維持支援システム(CACC:Cooperative Adaptive Cruise Control)に係る研究開発も組み合わせることで隊列走行の実用・商業化を急ぐと発表した。 (坂上 賢治)
上記のなかで「ACC」は前走車と自車の間隔を車両搭載機器で計測・算出し、双方間の距離を一定に保つ機能だ。また「LKA」とは車線内での自動走行を維持できるよう白線を検知し、ステアリングを調整する機能を指す。
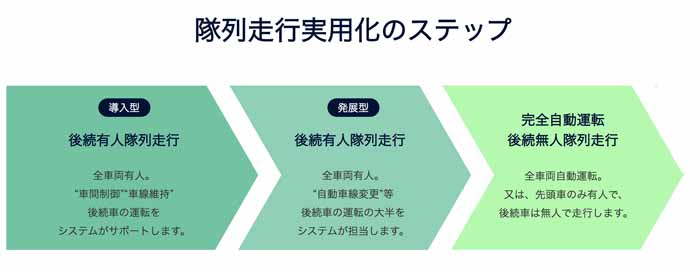
上記映像は新東名高速道路 2018年12月4日~14日に於ける後続車有人システムの公道実証実験の様子(経済産業省)
さらに「CACC」は先のACCを進化させたもので、自車が通信により前走車の制御情報を受信し、加減速を自動で行って車間距離を一定 に保つ機能のことだ。この3つの機能が前走車や追走車と互いに協調・連携できれば、安全なトラックの隊列走行が実現のものとなり、長距離移動時の運転者の疲労軽減が飛躍的に向上する。

そのためにも予てより大型車メーカー4社(いすゞ自動車、日野自動車、三菱ふそうトラック・バス、UDトラックス)で構成される自工会の大型車特別委員会(委員長:下 義生)は、「(1)物流の効率化」や、近年大きな社会課題となっている「(2)事業用自動車のドライバー不足への対応」、「(3)ドライバーの働き方改革」などに向け、2021年を目標に、この3つの技術が支えるトラックの隊列走行実現を進めてきた。
しかし異なるメーカー車両と隊列を組んで安全運行を行うには、前走車にあわせて後続車が違和感なく加速・制動できることが必要となる。実際に大型4社は2017年度より、政府が音頭を取る〝高速道路に於けるトラック隊列走行の実証事業〟等に積極的に参画。隊列走行を行う物流事業者との意見交換を通じて、隊列走行への理解を深める努力を重ねてきたのだが、先の政府目標を踏まえると、その進展をさらに加速させる必要があった。
そこで遂に大型4社は「2021年までに実用的な後続車有人隊列走行システムの商業化を目指す」という政府目標に対して、ACCとLKA、さらにCACC技術も高めて、それらによる後続車有人システムの本格商業運用を視野に、装備・商品開発のスピードを加速化させる動きに出る。
今後、大型4社は社会や物流事業者からの意見も同時収集、政府との議論継続、それに伴うインフラ支援や制度整備の要請なども踏まえつつ、未来に向けてますます複雑化・深刻化する〝輸送〟上の社会課題解決を一気に改革していく構えのようだ。