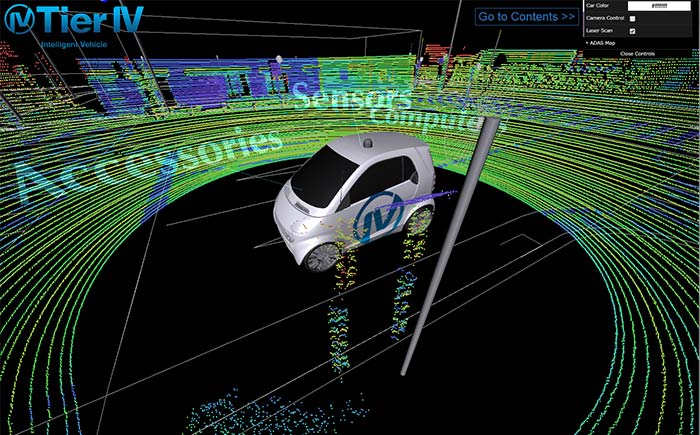
パイオニアが開発を進めている走行空間センサー「3D-LiDAR」が、ティアフォーの自動運転システム用オープンソースソフトウェア「Autoware」に対応した。
この対応は、ティアフォーが「Autoware」で同社製「3D-LiDAR」の信号を処理するためのドライバソフトウェアを開発したことで実現。これにより、「Autoware」を採用する企業や研究機関が行う自動運転の実験において、同社製「3D-LiDAR」の活用も可能となる。
「Autoware」は、名古屋大学、長崎大学、産業技術総合研究所などが共同開発した世界初の自動運転システム用オープンソースソフトウェア。既存の車両やセンサーなどと組み合わせて自動運転システムが構築できるため、自動車メーカーをはじめとする多くのメーカーや、大学などの研究機関で採用されている。
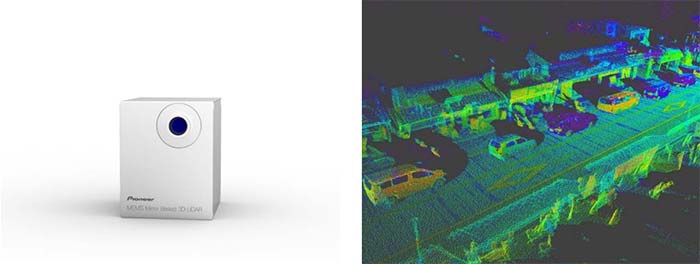
「3D-LiDAR」は、遠方の物体までの高精度な距離の測定や、物体の大きさを検出できるセンサーで、物体形状の把握も可能なため、自動運転に不可欠なキーデバイスと言われている。
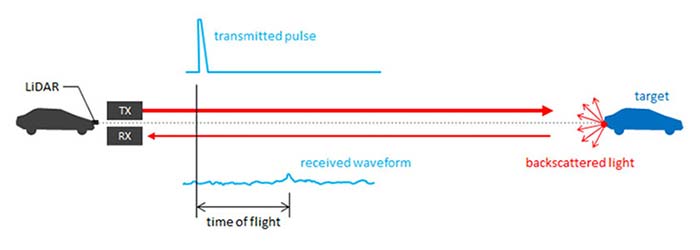
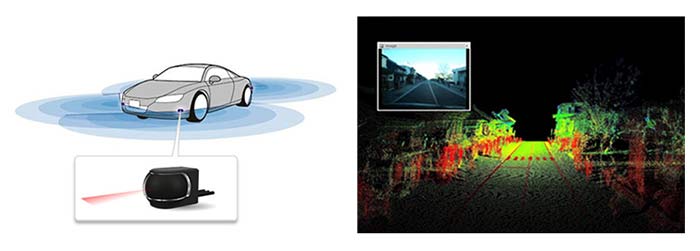
LiDARは光を利用したセンサーで、照射した光パルスの反射光を受信、解析処理することでオブジェクトまでの距離を高精度で検出する。3D-LiDARシステムでは、このLiDARと光スキャナーを組み合わせることで、車周囲のオブジェクトを3次元で把握、距離と方向を高精度で検出することが可能だ。
車載レイアウト例(左)とLiDARで取得した3D点群(右)
パイオニアは、3D-LiDARシステムに必要な光技術、制御技術、広帯域アナログ回路技術、信号処理技術を従来の製品で培ってきた強みがあり、これらの技術を応用し高い性能と信頼性を持った小型かつローコストの3D-LiDARシステム実現を目指し研究開発を行っているとしている。
また、2020年以降の量産化を目指し、高性能で小型、低コストな「3D-LiDAR」の開発を進めており、本年9月より、国内外の自動車メーカーやICT関連企業などへサンプル供給を開始。
相互で実用化に向けたトータルシステムとしての動作検証を行い、その検証結果を基に各企業の使用用途に適した仕様や形状、サイズなどの検討を行うとともに、独自のデジタル信号処理手法を用いて、これまでLiDARでは難しいとされていた黒色の物体や遠方物体(LiDAR側で受信するレーザー光が微小な状況)の計測能力を高める技術の開発を進め、一般道でのレベル3、もしくはそれ以上の自動運転車両への搭載や、次世代GISサービスなどへの活用を目指している。
今後、「Autoware」を採用している企業や研究機関などへも「3D-LiDAR」のサンプルを供給するなど自動運転関連の開発を推進し、自動運転の早期実用化に貢献していきたいとコメントしている。
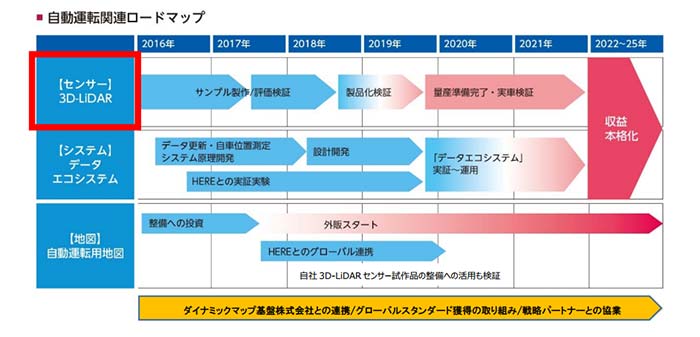
3D-LiDAR センサー、自動運転用地図、データエコシステムの構築・提案のロードマップ
【株式会社ティアフォーについて】
名古屋大学の自動運転技術に関する研究開発成果を利活用し、自動運転の認知、判断、操作にかかる機能モジュール、並びにそれらに関する情報処理プラットフォームを提供する大学発のベンチャー企業。最先端の研究開発を行うメーカーや大学向けに、オープンソースの自動運転システム用ソフトウェア「Autoware」を基盤としたソリューションを提供するなど、将来の自動運転技術に関するオープンイノベーション創出に貢献。