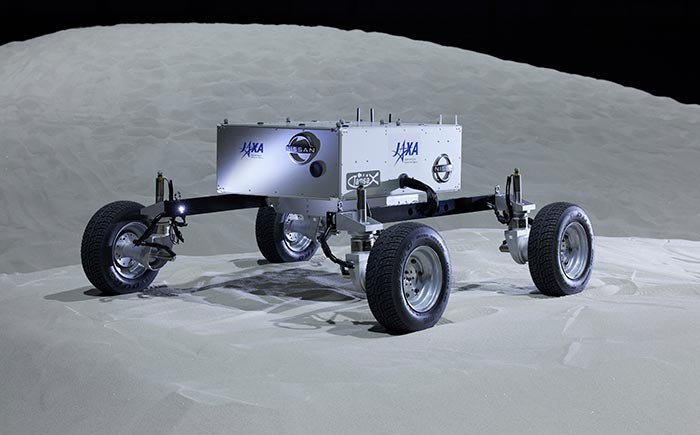
日産自動車(以下「日産」)は12月2日、国立研究開発法人宇宙航空研究開発機構(以下「JAXA」)と共同研究を行っている月面ローバ(探査車)の試作機を公開した。
JAXA宇宙探査イノベーションハブでは、宇宙探査に必要な技術の一つとして月面ローバの研究が行われている。日産は2020年1月から共同研究に参画し、「日産リーフ」に代表される電気自動車の開発で培ってきたモーター制御技術と、「日産アリア」に搭載される電動駆動4輪制御技術「e-4ORCE」を応用し、月面ローバの駆動力制御に関してJAXAと共に研究を進めている。
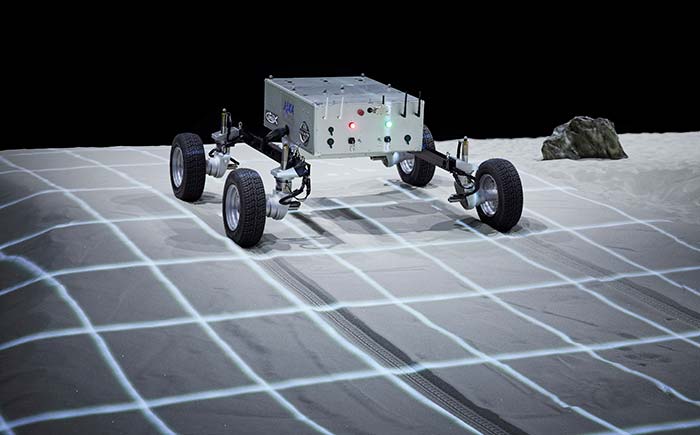
砂漠などの砂地をクルマが走行する際には、タイヤが空転し、砂に潜ることで脱出困難な状態(スタック)に陥ることがある。このような事態を回避するためには、ドライバーがタイヤの空転量を繊細にコントロールする必要があり、非常に高い技量が求められる。
共同研究では、路面状況に応じてタイヤの空転量を最小限に抑え、様々な路面環境において走行性能を高める駆動力制御を研究・開発している。
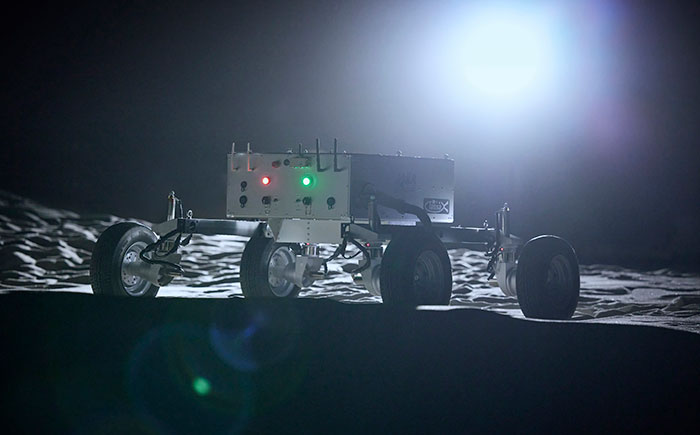
日産によると、タイヤの空転量を最小限に抑えることは、砂地でのスタックを回避できるだけではなく、空転によるエネルギーロスを最小化することにもつながり、結果として走行エネルギーを効率化することにもつながる。また、過酷な環境下での走行性能を高め、走行エネルギーを効率化する技術の開発は、月面で走るローバだけでなく、地上で走るクルマの走行性能も向上させるという。
JAXA 宇宙探査イノベーションハブの船木 一幸ハブ長は、本研究について以下のように述べている。
「JAXAは、将来的に研究成果を宇宙探査へ応用することを目的としつつ、 地上での事業化/イノベーション創出の実現性や可能性がある課題に企業や大学・研究機関の方々と共同で取り組んでいます。様々な電動駆動技術ノウハウを持つ日産と共に研究を行うことで、より高性能な月面ローバの開発に応用できることを期待しています。」
また、日産でe-4ORCEの制御開発を担当している、先行車両開発部部長の中島 敏行は次のように語った。
「月面という環境を想定したローバの共同研究に参加できることを非常にうれしく思っています。自動車の用途や走行シーンは様々であり、私たちが目指す究極の走行性能の研究開発を進めるにあたり、JAXAとの本共同研究で得られるノウハウは、地上における自動車のイノベーションにもつながると考えています。」