川崎重工は3月28日、工場内物流の無人化を目的として開発した多用途UGV(多用途無人地上車両)による無人物資輸送の実証実験に成功したと発表した。
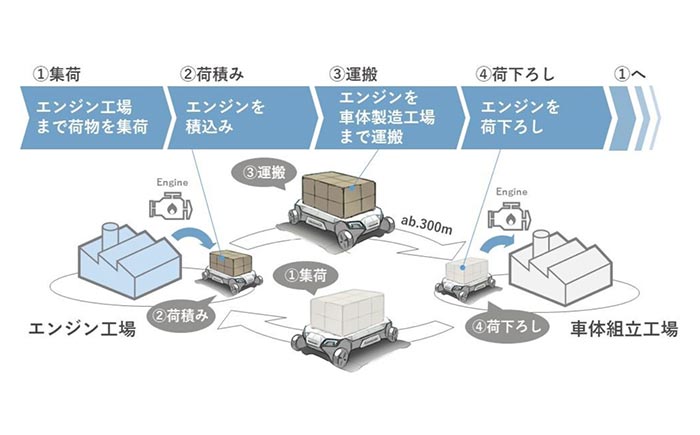
この実験は同社明石工場のモーターサイクル製造ラインにおいて、有人トラックで行っている工場内のエンジン運搬が、無人自律走行の多用途UGVに置き換え可能であることを実証するもの。多用途UGVに1回あたり15台のエンジンを積載し、エンジン工場から300mほど離れたモーターサイクル組立工場まで、無人自律走行により搬送した。
実験で使用した車体のパワーユニットにはモーターを採用し(EV)、工場内走行を行うため足回りはオンロードスタイル、また車上設備はエンジンの輸送に最適なキャリアスタイルを採用した。充電環境の確保が難しい場所や、未舗装路での走行には、エンジンを搭載したオフロードスタイルを選択するなど、活用するフィールドに合わせて車体のカスタマイズが可能となっている。
■川崎重工が開発した多用途UGVの特長
・高い走行性能を誇るカワサキモータース製のオフロード四輪車両”MULETM”に、無人自律走行用のシステムを搭載。
・レール等を必要としない無軌道走行のため、工場に導入する場合は追加設備が不要で、狭い通路でも自動走行が可能。
・走行ルートの変更を容易に行うことができ、製造状況に応じた行先の変更や製造ラインの変更にも柔軟に対応可能。
<カスタマイズ可能な機能>
パワーユニット:エンジン(ICEV:内燃機関自動車)もしくはモーター搭載(EV仕様)
足回り:”MULETM”の強みを活かした未舗装路で走行可能なオフロードスタイルもしくは舗装路走行を意図したオンロードスタイル
車上設備:人の乗車を目的としたシートスタイルもしくは搬送物に合わせたキャリアスタイルなど