東芝デバイス&ストレージは、レーザの照射により離れた物体までの距離情報を3D画像として得る「LiDAR(注1)」の長距離測定の解像度を向上させる計測アルゴリズム技術を開発した。
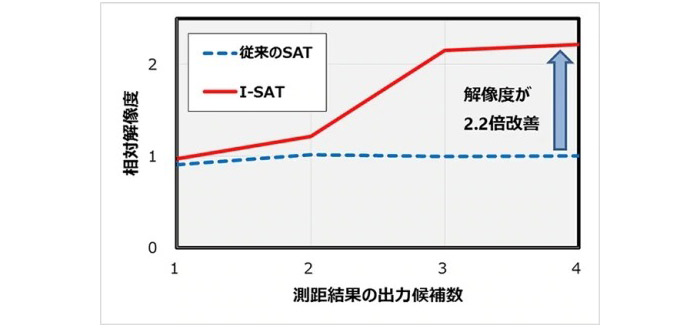
この技術により、長距離の測距画像の解像度(注2)を、東芝グループの従来技術(注3)に比べ2倍以上に向上(注4)。技術の詳細を、横浜で開催された「COOL Chips 2019」で、4月19日に発表した。

[開発の背景]
周辺環境を3D画像として把握できるLiDARは、高度な自動運転システムの実現に資する有力な技術とされている。
車載向けLiDARには、長距離を検知する性能が求められており、長距離を測定するには、太陽光などのノイズの影響を低減し、微弱な反射光の検知能力に加え、遠方のバイクや歩行者を検知するための高解像度な測距画像も求められる。
従来、ノイズの影響を低減する手法としては平均化処理が用いられてきたが、この手法では、長距離になった場合の精度維持や誤検出の除去に課題があった。
この解決に向け、東芝と東芝デバイス&ストレージは、スマート平均化アルゴリズム(SAT)と呼ばれる計測回路技術と距離データの信頼度を判断する技術を開発し、200mまでの長距離を高精度に測定することに成功したが、一方で、車載向けLiDARに求められる解像度にはさらなる改善の必要があった。
そこで東芝デバイス&ストレージは今回、SATの性能を向上させた「フレーム間スマート平均化アルゴリズム(I-SAT)」を開発し、長距離測距における解像度を改善した。
[フレーム間スマート平均化アルゴリズム(I-SAT)について]
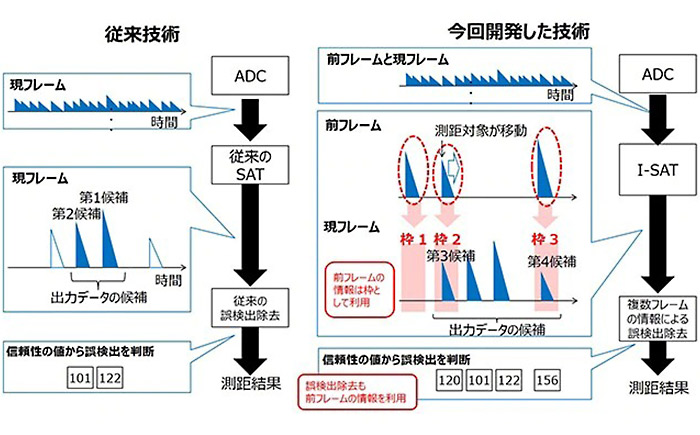
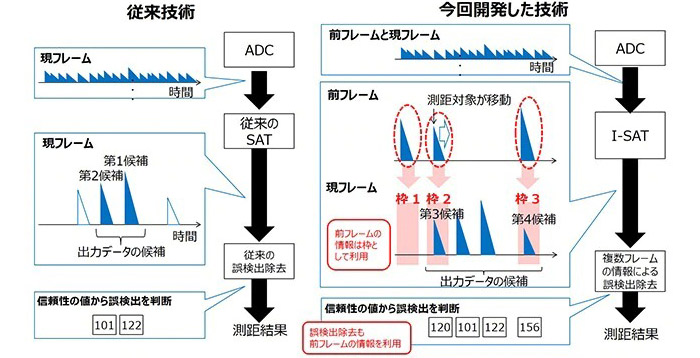
従来のSATでは、単一のフレーム(時間軸)における平均化の結果を基にノイズの影響を低減していたが、単一のフレームの情報だけでは、解像度の向上に限界があるため、複数のフレーム情報の利用を必要としていた。
しかし、複数のフレームの情報を基に平均化を実行しようとすると、前フレームの情報を保持しなければならないため、膨大なメモリ量が必要になり、実装コストが増加。また、測距の対象が移動する場合、前フレームの情報を現フレームの情報と混同し、間違った結果を出力してしまう問題があった。
今回開発のI-SATでは、前フレームの測距データをそのまま保持するのではなく、測距結果のみを保持することで、メモリの使用量を削減。また、前フレームの情報を利用する際、測距結果を枠として設定し、その枠の中にある現フレームのデータも出力データの候補として追加し、前フレームと現フレームの情報を混同することなく、出力データの候補数を増やすことができ、解像度が改善した。
更に誤検出の除去においても、複数のフレームの測距結果を使用して信頼度判断を行うことで、信頼性を向上させた。
これらの特長を備えたI-SATを用いることで、200mの長距離における解像度は、東芝グループの従来技術(注3)に比べ2倍以上に改善。車載向けLiDARに求められる空間分解能0.1°を実現した(注4)。
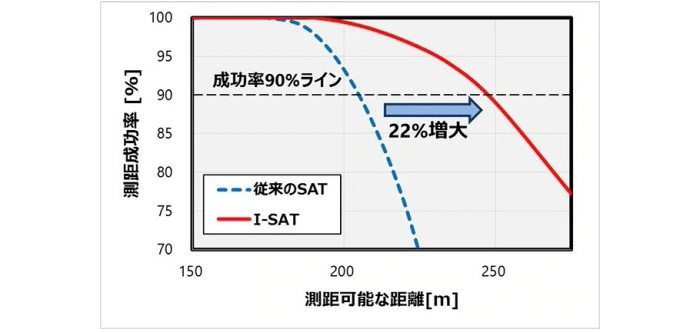
また、同一解像度における測距可能距離は22%増大。これにより、実装コストを、従来技術から1%以下の増加に抑えた(注5)。
東芝デバイス&ストレージは今後、本技術のさらなる測距精度向上や実装化に向けた開発を進め、2020年までに同計測アルゴリズム技術の実用化を目指す。
更に、LiDARシステム向けの半導体の高感度な集積型光センサ(SiPM)の開発を進め、今後もより高度な運転支援システム、自動運転システムの実現に貢献する半導体製品の開発を加速していくとしている。
注1)LiDAR:Light Detection and Ranging。
注2)解像度:距離方向(Z方向)に直行する方向(X,Y方向)に関する、距離情報の細かさ・密度。
注3:「ISSCC(International Solid-State Circuits Conference) 2018」で東芝が発表した計測回路技術(論文タイトル:20ch TDC/ADC Hybrid SoC for 240×96-pixel 10%-Reflection <0.125%-Precision 200m-Range-Imaging LiDAR with Smart Accumulation Technique)と、「COOL Chips 21」で東芝デバイス&ストレージが発表した技術(論文タイトル:Data Selection and De-noising Based on Reliability for Long-Range and High-Pixel Resolution LiDAR)を併用したもの。
注4:2019年3月時点、東芝デバイス&ストレージのシミュレーション結果に基づく。(測定条件:反射率10%、環境光は100 K lux、当社光学系に関して。測距成功は距離誤差が距離の1m以内と定義)。
注5:2019年3月時点、水平450画素と垂直192画素のフレームに対して、28nmプロセスで実装した場合のシミュレーション結果に基づく。