
ヴァレオ Drive4U
ヴァレオとダイナミックマップ基盤(以下、DMP)は2月25日、 自動運転システムの開発を促進するために、正確な自車位置推定とHDマップ更新のためのテクノロジーとビジネスモデルを共同で開発することを発表した。

車両が周辺環境を認識し、自車位置を正確に特定することは、ADAS(先進運転支援システム)と自動運転車の開発における主要課題の一つ。また、インフラおよび道路環境変化に対応する上で、自動運転車が使用するHDマップの定期更新も、リソースと時間を要する課題と言える。
DMPは、安全・快適な自動運転の実現に必要なHDマップと高精度3次元点群データ(ポイントクラウドデータ)を提供する大手プロバイダー。2019年には国内の高速道路・自動車専用道の地図データ整備を完了し、北米でもHDマップを整備中。また、2021年より日米の一般道整備に加え、欧州におけるHDマップ整備を計画している。
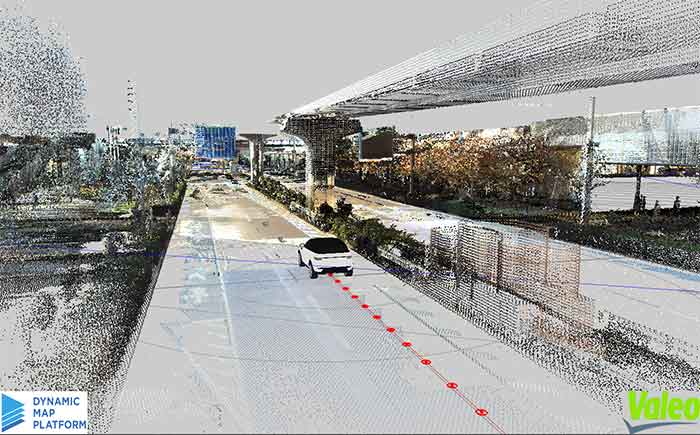
一方、自動車部品サプライヤーであるヴァレオは、ADASと自動運転システム向けのセンサーとシステムを開発している。これには、標準のGNSSと唯一の自動車グレードのLiDARであるValeo SCALA®とポイントクラウドマップのみを使用して市街地でセンチメートルレベルの精度での自車位置推定を提供する、高精度のローカリゼーションとマッピングシステムValeo Drive4U Locate®が含まれている。
両社は、ADASや自動運転の品質向上に必要な高精度自車位置推定技術、および地図更新技術につき、非独占的にグローバルに共同でサービスを提供することを目的に、技術・事業両面の検討を行うことを合意したとしている。