
写真1 ワイヤ吊り下げ式ロボットによる撮影状況
中日本高速道路(以下「NEXCO中日本」)は5月27日、「イノベーション交流会」技術実証の中から3件の技術を、実用段階に移行すると発表した。
「イノベーション交流会」は、次世代技術を活用した革新的な高速道路保全マネジメント「i-MOVEMENT(アイ・ムーブメント)」の実現に向けて、コンソーシアム方式によりオープンイノベーションを推進する組織として、2019年7月に設立された。NEXCO中日本が抱える業務課題とイノベーション交流会に参加する107の企業・団体が保有する先端技術を組み合わせ、現在20件の技術実証が進められている。
今回、20件の技術実証の中から業務への導入効果が得られると判断された3件の技術が実用段階に移行。すでに移行している3件と合わせて6件となった。
■実証結果と今後の展開
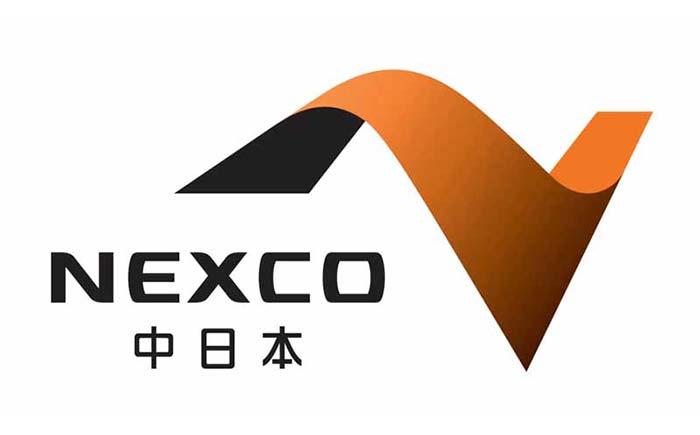
1.プローブ情報を活用し道路管制センターで把握する異常事象検知の迅速化
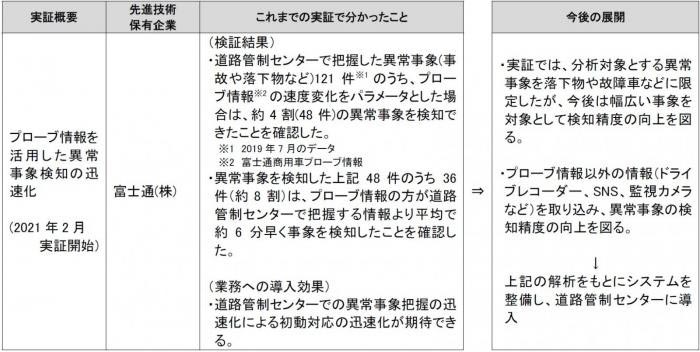

図1 異常事象の情報収集から初動対応までの流れ
2.橋梁床版内部の診断画像の数値化による補修計画策定の省力化
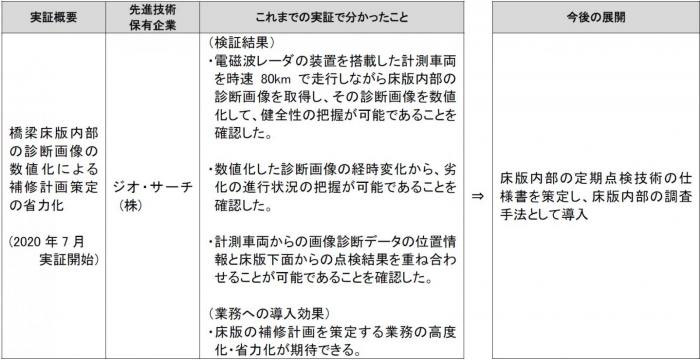
図2 床版内部の診断画像と床版下面の点検結果の重ね合わせ
3.点検ロボットによる橋梁点検業務の高度化・省力化
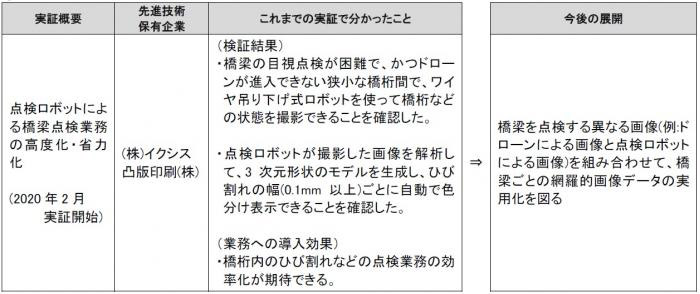

図3 点検ロボットで取得した画像データから生成した3次元モデル
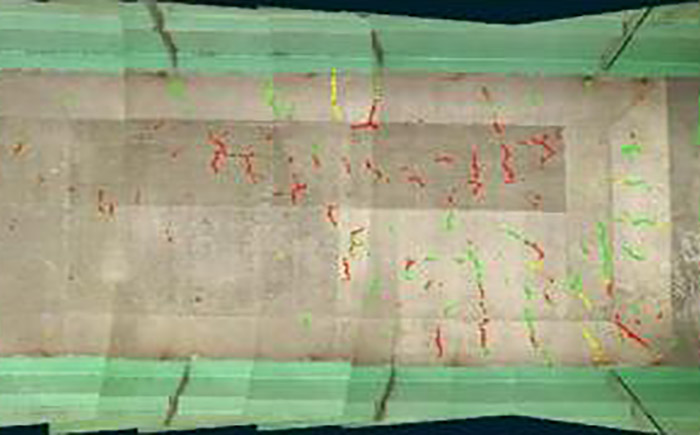
図4 画像解析によるひび割れ幅ごとの色分け表示(図3の拡大図)